DIE SUSHI KLASSE
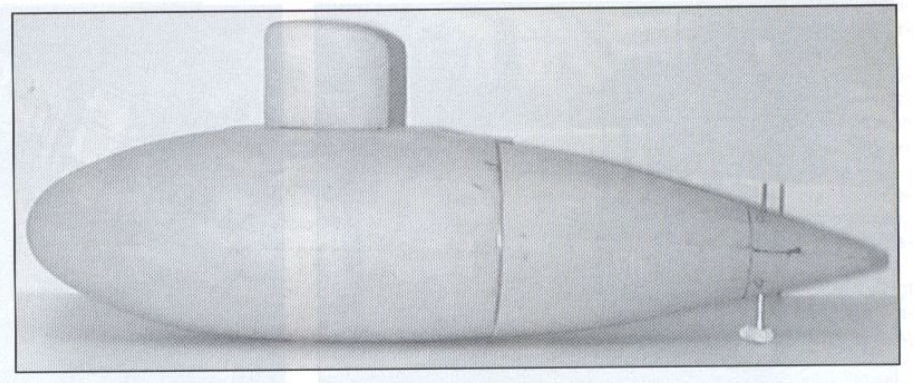
ODER: "EIN U-BOOT IN 11 TAGEN"
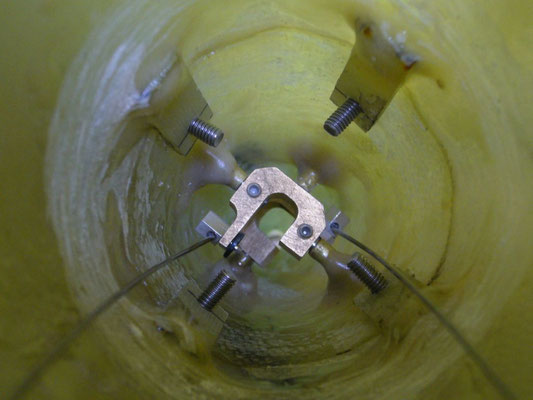
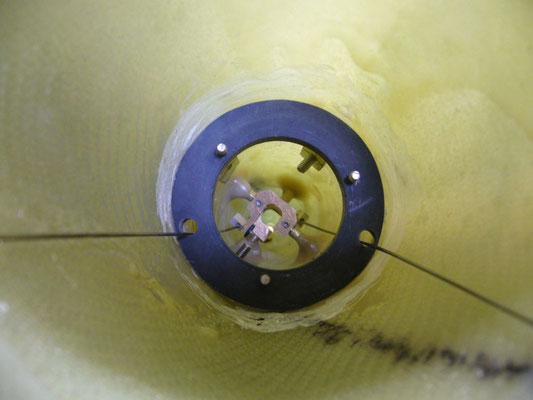
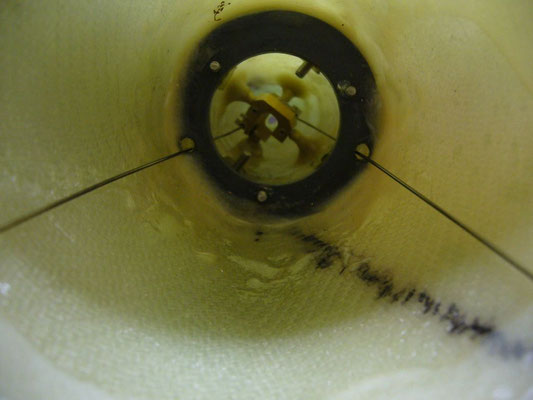
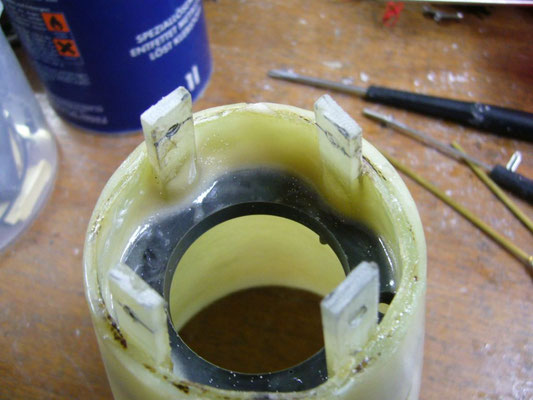
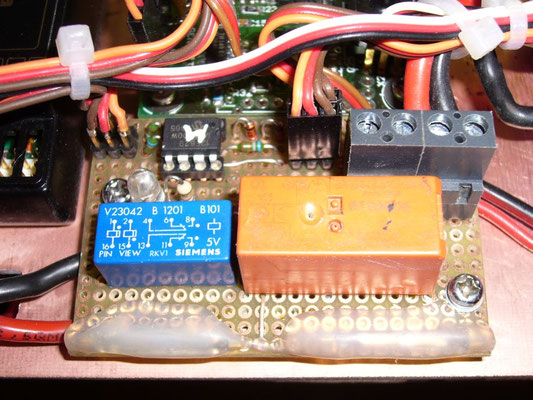
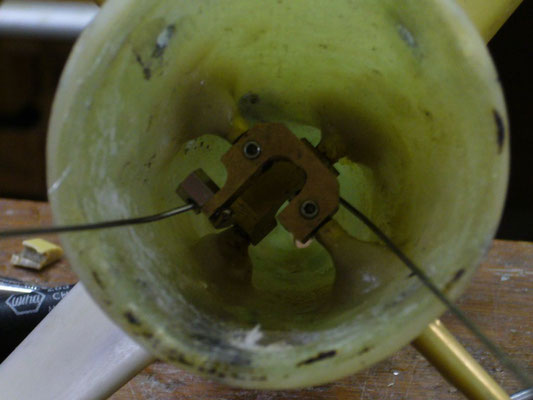
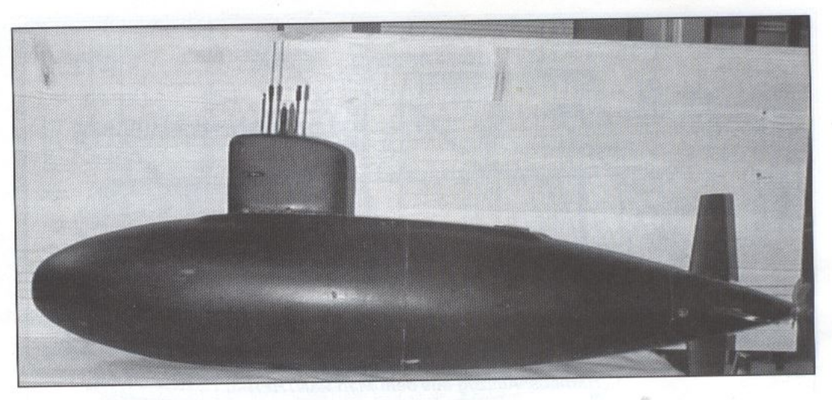
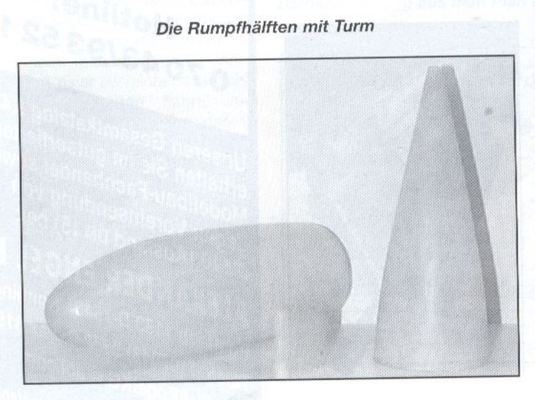
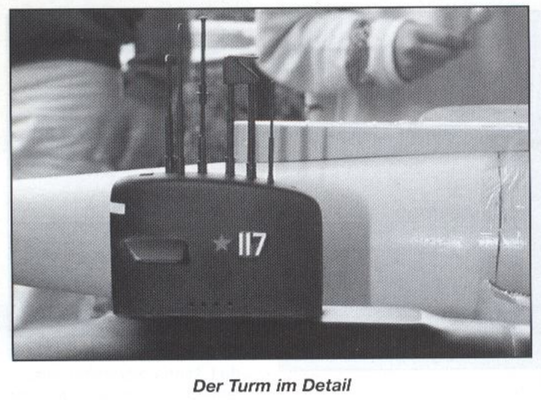
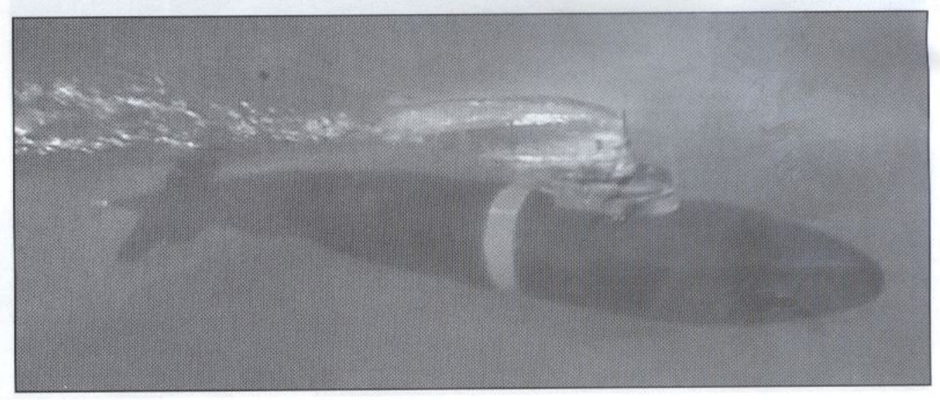
Beim UBoot Treffen im Krefelder Freibad hatte ich mich schon auf ein "relativ unkompliziertes" Fahren mit meiner 202 gefreut. Klar, der Kahn hat seine spezifischen Macken, aber da ich sonst nichts fertig hatte, musste ich halt mit der SCHÜRER vorlieb nehmen. Alles war auch soweit in Ordnung, nur die Fahreigenschaften rissen mich wie so oft nicht gerade zu Begeisterungsstürmen hin. Ein neues Boot musste her! Allerdings wollte ich keinen meiner "Standardrümpfe" neu auflegen. Das ist ein Rohr mit "Schildkrötenrücken", Turm und Kreuzruder komplett aus GfK mit Bajonettverschluss. Die Dinger fahren zwar nicht schlecht, aber das Thema war für mich ziemlich ausgereizt. Oberkritiker Norbert Heinrichs überredete mich dazu, eine SUSHI zu bauen. Basierend auf zwei Unterteilen meines Standardrumpfes mit einer Gesamtlänge von 58 cm und einem Durchmesser von 10,7 cm hatte Norbert vor einiger Zeit die SUSHI kreiert. Eigentlich wollte er daraus einen DELPHIN machen, entschied sich aber, in Anlehnung an die japanische YUSHIO Klasse ein "vernünftiges" Boot zu bauen. Die YUSHIO hat einen tropfenförmigen Rumpf, Kreuzruder, einen Propeller hinter den Rudern und einen ziemlich weit vorne liegenden Turm mit Tiefenrudern. Dieses Äußere übernahm er und verkürzte nur den Rumpf auf besagte 58 cm. Irgendwer taufte den Kahn dann bei passender Gelegenheit in SUSHI um. Die Eigenschaften des Bootes sind bemerkenswert: Ca. 5 kg schwer, handlich, ziemlich schnell (mit 35mm Bühler Motor zügige Schrittgeschwindigkeit), lange Fahrzeit (mit Kippenpause und Blabla ca. 1,5 Std.) leicht zu bauen und billig obendrein! Er hatte einen Akku mit 7 Zellen, 50mm Kolbenpumpe, zwei Standardservos und normalen Empfänger eingebaut, auf Lageregler oder Sonderfunktionen wurde komplett verzichtet. Diese Kiste wollte ich auch haben, das Problem war nur, dass ich bis zum Treffen in Barsinghausen keine zwei Wochen mehr Zeit hatte. Also musste alles genau geplant werden, um rechtzeitig fertig zu werden. Montags, dienstags und mittwochs wurde der Rumpf abends laminiert und der Bajonettverschluss verklebt. Parallel dazu habe ich die Pumpe an sich und erste elektronische Baugruppen wie Drehzahlsteller, Schaltregler BEC und 2KanalSchalter erstellt. Zur Verwendung kam eine 50mm Kolbenpumpe mit Faulhaber Getriebemotor ohne Endabschalter (kostet alles Zeit!). Die Pumpe wurde von einem Doppelrelaisschalter von N. Brüggen angesteuert. Dadurch hatte ich bei Wassereinbruch und Funkabriss noch eine FailsafeFunktion und das Boot ist nicht unbedingt direkt verloren. Das Volumen der Pumpe betrug ca. 120 ml. Mehr war vom Platz her nicht unterzubringen. Am Donnerstag fiel aufgrund meines Badminton Abend das Bauen flach. Freitagabend und Samstag wurden Ruder, Anlenkung, Ständer und erste Arbeiten am Innenleben montiert. Die Ruder sind Fertigbauteile von Norbert Brüggen. Hergestellt aus gegossenem Resin sind die Ruder eine Alternative zum Selbstbau. Die Technik wird auf einem Rahmen befestigt, welcher an drei Punkten mit dem Heckteil verbunden ist. Nach Öffnen des Bajonettverschlusses liegt die Technik praktisch auf dem Präsentierteller. Nachdem man durch Lösen von drei M5 Muttern den Technikrahmen entfernt hat, kann man den Motor inklusive Stevenrohr, Welle und Drehzahlsteller aus dem Heckteil entfernen. Die Motor/Stevenrohreinheit wird durch einen auf einem Heckspant geklebten Simmerring mit 6 mm Innendurchmesser abgedichtet. Das ist einfacher als die Abdichtung durch einen O-Ring, da hierfür ein Halter gedreht werden muss. Diesen Simmerring hatte ich günstig auf der Intermodellbau bei Lehnert gefunden. Sonntags waren dann Motor mit Wellenanlage, Drehzahlsteller und der Rest vom Interieur dran. Beim Motor entschied ich mich für einen 9 V Faulhaber 3557 mit Stahlpropeller. Der Propeller ist zwar für einen 40 mm Bühler optimiert, aber laut Norbert Brüggen auch für diesen Faulhaber zu gebrauchen. Ebenfalls am Sonntag war der Turm an der Reihe. Dieser besteht aus 0,5mm Platinenmaterial, 0,5mmABS, zwei Esslöffeln kleingeraspeltem Platinenmaterial, 50 g Sekundenkleber und einigen kräftigen Stößen Aktivatorspray. Durch dieses Spray wird der Kleber aufgeschäumt und verbindet sich mit den Epoxiflocken zu einer zähen Masse, welche sich im Wasser nicht auflöst. Nachdem einige Details wie Tiefenruder, Ausfahrgeräte und Einstiegsluken aufgebracht waren, konnte ich den Turm mit dem Rumpf verkleben. Am Montag darauf hatte ich Gelegenheit, das Boot zu schleifen und teilweise abzuspachteln. Da ich noch am selben Abend Grundierung und die erste Lackschicht auftrug, konnte ich am Boot selbst nicht mehr viel machen. Ich habe die Zeit genutzt, um noch ein paar Platinen zu löten und meine Frau, welche die ganze Woche noch nichts von mir gehabt hatte, ruhigzustellen. (Bitte keine falschen Schlussfolgerungen ziehen, sie lebt noch!). Dienstags wurden die elektrischen Baugruppen wie Lageregler, Pumpensteuerung, Empfängerakku (anstatt Ballastblei) und eine Notakku Umschalteautomatik eingebaut und verdrahtet. Auch die Servos konnte ich einbauen und mit den Bowdenzügen verbinden. Bei der Abdichtung der Ruderanlenkung wurden neue, innovative Wege beschritten: Die Ruderanlenkungen bestehen aus MsRohr (außen 2, innen 1 mm Durchmesser) als Führungsrohr. Als Anlenkungsdraht verwendete ich 1mm Edelstahldraht aus dem Schweißzubehör, da hat man 100% ig keine Probleme mehr mit rostendem Anlenkungsdraht. Übrigens: Wer diesen Draht nur auf Rolle aus dem Baumarkt kennt, sollte mal ein richtiges Schweißzubehörgeschäft aufsuchen. Da der Draht nur 1 mm stark ist, gestaltete sich die Abdichtung recht knifflig. Die Lösung des Problems besteht aus einem kurzen Stück Moosgummi, welches auf das Ende des Führungsröhrchens innerhalb des Rumpfes gesteckt und aufgeklebt wird. Der Stahldraht wird eingeschoben und einfach durch das Moosgummi durchgestochen, danach ein Tropfen Öl auf das Moosgummi. und fertig ist eine Abdichtung zum Dumpingpreis. Die Dichtfläche ist bei mir 1 cm lang und trotzdem noch sehr leichtgängig. Eine Druckprobe des kompletten Rumpfes mit einem Kompressor bei 2 bar Innendruck brachte erste vielversprechende Ergebnisse. Mittwoch, der letzte Tag vor Barsinghausen, wurde mit Finish, Austarieren, Abdichten der letzten Leckagen und Lackieren verbracht. Bis auf das Austarieren in meinem Testtank war der Kahn noch keinen Meter gefahren. Da ich zwar einen Kompressor, aber zu diesem Zeitpunkt keine Spritzpistole hatte, musste ich auf Spraydosen zurückgreifen. Die, die ich gekauft hatte, schienen nicht unbedingt ganz in Ordnung gewesen zu sein, denn der Lack brauchte ewig lange zum Trocknen. Donnerstag, am Tag der Abfahrt noch schnell die Akkus geladen und vorsichtshalber reichlich Werkzeug und Ersatzelektronik eingepackt. Da das Wetter prächtig und der Lack noch nicht ganz durchgehärtet war, habe ich während der Fahrt mein Auto zur Trockenkammer umfunktioniert: Fenster hoch und Heizung auf Vollgas mit Gebläse aufs Boot. Ich habe zwar ziemlich geschwitzt, aber der Lack war bei der Ankunft in Barsinghausen schön trocken. Kaum angekommen wurden erste Testfahrten im Becken unternommen. Ha! Macht echt Spaß, auf den Beckenrand zuzufahren und 40 cm vorher mit AK und Hartruder unten abzudrehen. Das Boot geht mit einem rechtwinkligen Haken senkrecht in die Tiefe. Die Steuereigenschaften sind phänomenal und schnell ist das Boot obendrein. Loopings rückwärts sind kein Problem, Sprünge um eine Bootslänge aus dem Wasser auch nicht. Wenn nach 10 Minuten das Beste aus dem Akku raus ist, hat man immer noch ca. 7 km/h, bis der Akku leer ist. Eine längere Fahrt auf 4 m Tiefe verlief allerdings nicht so glimpflich. Durch einen Defekt am O-Ring der Tauchpumpe lief das Boot voll Wasser und tauchte nicht mehr auf. Nachdem ich es geborgen hatte, stellte sich nach dem Trocknen heraus, dass Empfänger und Drehzahlsteller das Bad nicht überlebt hatten. Da ich immer einen Ersatz Empfänger für mich und einen Ersatz Drehzahlsteller für Rainer Gerlach dabei habe, konnte ich diesen Ausfall allerdings schnell beheben. Ich habe danach die Pumpe abgeklemmt und bin die restlichen Tage rein dynamisch gefahren. Hierbei hat sich herausgestellt, dass man auf eine Tauchpumpe sehr gut verzichten kann. Da das Boot ziemlich schnell und wendig ist, muss man in Naturgewässern sowieso aufpassen bzw. besser nicht fahren wenn man sich nicht sicher ist. Ebenso habe ich den Stahlpropeller gegen einen 7 Blatt Propeller von PropShop getauscht. Die Geschwindigkeit ist geblieben, jedoch passt dieser Prop besser zum Motor. Dadurch hat sich die Stromaufnahme um ca. 0,5 A reduziert, was der Motor mit längerer Lebensdauer danken wird. Die hohe Geschwindigkeit verpflichtet aber zum Einsatz eines Lage/Tiefenreglers. Ohne Regelung ist das Boot nicht zu beherrschen! Nach einigen Jahren habe ich nun inzwischen die vierte SUSHI gebaut. Zwei für Freunde und die vierte wieder für mich. Das Konzept habe ich weiter vereinfacht und verbessert: Der Turm wurde durch eine strömungsgünstige Variante aus GfK ersetzt und für den Rumpf habe ich eine neue Form hergestellt. Jetzt wird der Rumpf nahtlos in einem Stück laminiert, dadurch erreicht man eine maximale Festigkeit, sogar frontales Auffahren auf die Schwimmbadwand wird schadlos weggesteckt. Die Zellenzahl ist auf 12 gestiegen und als Motor kommt jetzt ein 650er von Hopf zum Einsatz. Die Pumpe entfiel ersatzlos, ebenso das BEC System mit der Umschalteautomatik. Die ursprünglich fest eingebauten Akkus sind nun zum Wechseln entnehmbar. Auch eine Beleuchtung wurde installiert, hier habe ich ausnahmslos in "Superhell" investiert: Das Oberdeck hinter dem Turm zieren zwei Lichtorgeln aus insgesamt. 23 roten, orangen, blauen und grünen LEDs. Diese Lichtorgeln werden von zwei Schaltungen abwechselnd angesteuert. Alle LEDs zusammen nehmen ca. 500 mA auf. Diese Beleuchtung hat natürlich nichts mit einer korrekten Beleuchtung auf einem Schiff, sei es zivil oder militärisch, gemeinsam, hier sollte nur der Spaß am Nachtfahren erhöht werden. Mit dem neuen Motor wird bei Sprüngen aus dem Wasser nun manchmal gleich noch eine Rolle mitgeliefert. "Schuld" daran ist das enorme Drehmoment des Motors. Wird kurz vor dem Sprung das Seitenruder herumgerissen, so wird die Rolle perfekt. Bei genügend tiefem Fahrgewässer sind auch Rollen unter Wasser kein Problem. Das letzte Boot hat im Laufe der Zeit einige Veränderungen durchmachen müssen. Die Bilder zeigen deshalb einige unterschiedliche Testphasen. Probehalber wurde auch einmal der Turm demontiert. Dabei zeigte sich, dass der Turm als stabilisierendes Element unverzichtbar ist: Bei Vollgas drehte sich das Boot durch das sowieso schon ausge prägte Krängungsmoment auf die Seite und war schlecht zu kontrollieren. Um den Geradeauslauf des Modells zu stabilisieren, habe ich zwischen Ruder und Schraube kleine Hilfsflächen angeklebt. Da die Ruderblätter ohne Vorruderflächen ausgeführt sind, ist der Einsatz der zusätzlichen Ruder hier sinnvoll und verleiht dem Modell ein etwas außergewöhnliches Aussehen. Auch diese Ruder sind aus Resin gegossen. Anschließend möchte ich noch bemerken, dass sich die ganze Plackerei 100%ig gelohnt hat. An diesem Modell kann man sehen, dass es nicht Monate oder Jahre dauern muss, ein Boot zu bauen, welches die Aufmerksamkeit der Zuschauer auf sich zieht. Bei der SUSHI ist es auch möglich, mit kleinem Geldbeutel an ein vernünftig fahrendes Boot zu kommen. Der Motor kann ein billiger 35mm Bühler (bei Conrad für knapp 2 DM), ein schneller Hopf oder oben genannter Faulhaber sein. Möchte man so in Richtung Keller, ULTRA etc., wird man wahrscheinlich um eine 2 AchsRegelung nicht herum kommen. ansonsten kann man auf eine Lage und Tiefenregelung aber durchaus verzichten.
Die zwei separat angesteuerten Tiefenruder sind platzmäßig kein Problem, natürlich könnte man auch eine XRuder Anordnung realisieren. Ein Möglichkeit zur Realisierung von vier einzeln angelenkten Rudern auf einer Rotationsachse zeigt die Skizze. Die Dicke des Drehteils beträgt 10 mm. Zugegeben, die Anordnung ist ein wenig massiv, dadurch jedoch ziemlich stabil. Einen Versatz der Ruderwellen gibt es nicht, die Ruderwellen werden durch die Anlenkhebel in ihrer Position gehalten. Ersatzruder können vorgefertigt und bei Bedarf einfach durch Lösen der Madenschraube, welche den Anlenkhebel festhält, ausgetauscht werden. Auf dem UBoot Treffen in Berlin hatte ich Gelegenheit, die SUSHI von Dietmar Czirr zu beobachten. Er hat das Boot mit XRuder gebaut und am Turm eine SEA WOLF mäßige Verkleidung angebracht. Mit dem XRuder ist die SUSHI noch viel wendiger bei kleinstem Ruderausschlag. Solche Ruderanlenkungen können mit einem Mischer realisiert werden.
BILDER
Leider habe ich nur noch Screenshots aus der Schiffsmodell von 12/1999, die originalen (Chemie) Bilder sind im Laufe der Jahre verloren gegangen.


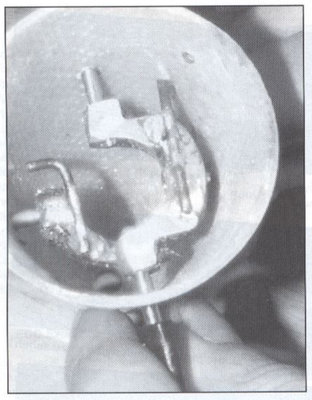

BAUSTUFENBILDER VON SPÄTEREN BOOTEN