Mein Bau eines Quadrokopters
oder
Der Weg zum optimalen Rahmen für mich
Hauptsächlich baue ich seit vielen Jahren Modell U-Boote. Vor einigen Monaten machte ich auf einem Modell U-Boot Treffen zum ersten Mal Bekanntschaft mit einem Quadrokopter. Einer der U-Boot Jungs hatte einen mitgebracht und auf dem Gelände des Freibades ein paar Runden gedreht. Unter einem Quadrokopter versteht man ein Fluggerät mit 4 Rotoren die von einer recht aufwändigen Elektronik angesteuert werden. Meist sind diese Rotoren in der Form eine Kreuzes + oder auch als X angeordnet. Exoten nutzen auch die Möglichkeit drei Ausleger zu bauen und auf einem der dreien gleich zwei Motoren zu platzieren.
Ich hatte mich bis zu dem Zeitpunkt mit verschiedenen Hubschraubern und auch einigen Flugzeugen rumgeschlagen, das konnte mich aber alles nicht so überzeugen. Ohne Zweifel waren diverse Abstürze zum einen Teil meinen mangelnden Flugfähigkeiten zuzuschreiben, für den anderen Teil der Abstürze zeichnete sich ein gewisser Übermut gepaart mit fehlender Übung verantwortlich. Eine sehr gefährliche, und auch kostspielige Mischung. Dieses Fluggerät hier versprach allerdings eine gewisse Sicherheit beim fliegen, da hier besagte aufwändige Elektronik für die Regelung der Fluglage zuständig war und mein reizüberflutetes Hirn spürbar entlastete.
Der Kollege, dessen Fluggerät mich beeindruckt hatte, flog mit elektronischen Bauteilen von HISystems. Diese Firma verkauft Bauteile die zum Bau eines sogenannten Mikrokopters benötigt werden. Im Grunde sind es Regelplatinen die die Lage des Mikrokopters im Raum stabilisieren. Das geht soweit, das hier ein Drucksensor die Höhe kontrolliert und hält, eine Kompassplatine die genaue Richtung hält und bei Bedarf ein GPS Modul den Mikrokopter auf Knopfdruck entweder zum Startpunkt zurückholt oder auch eine vorher definierte Wegstrecke abfliegt.
Er hatte natürlich die elektronische Maximalbestückung verbaut und konnte auch die Möglichkeiten vorführen. So ein Gefährt musste ich auf kurz oder lang auch haben, und so machte ich mich nach der Heimkehr daran das Internet nach diesen Fluggeräten zu durchforsten. Schnell waren einschlägige Seiten gefunden die alle mögliche Rotoranzahlen von 3 (Trikopter) bis 12 (Dodekakopter) bedienten und alle ihre Vor- und Nachteile hatten.
Für meinen eigenen Einstieg in dieses neue Hobby wählte ich einen Quadrokopter. Wie der Name verrät werden hier 4 Motoren verbaut. Sie alle besitzen je einen eigenen Drehzahlsteller der die Motoren ansteuert.
Nach kurzer Recherche im Internet über die Verfügbarkeit der Elektronik wurde kurzerhand alles an Fluggeräten verkauft um eine solide Basis in Form rechteckiger Papierscheinchen zu schaffen, sprich, weg mit den alten Zöpfen und her mit der Kohle. Der stark gepimpte LMH musste genauso weg wie ein wenige Monate zuvor "dringend benötigter Walkera 4#3b", mein geliebter Easy Star (keine Ahnung der wievielte es war) und ausserdem noch der Funjet der kaum Meilen auf dem Buckel hatte.
Stattdessen wurde in Hardware investiert, in diesem Fall in eine Flycontrol 2.0, vier Drehzahlstellern aus China und eben so vielen billigen Motoren gleicher Provenienz.
Die Flycontrol 2.0, kurz FC2.0, besitzt einen leistungsfähigen Prozessor der die Signale der Sensoren verarbeitet, das Empfängersignal auswertet und alles an die Drehzahlsteller schickt.
Die Sensoren sind hier sogenannte MEMS Sensoren die keinerlei Drift mehr aufweisen. Hier werden 3 separate Gyros und ein 3-Achs Beschleunigungssensor benutzt. Auf den älteren Versionen der FC wurden noch driftbehaftete Sensoren eingesetzt die dann bei Temperaturwechseln schon mal das nachtrimmen nötig machten. Die MEMS Sensoren weisen diesen Drift nicht mehr auf, diesen Umstand erkauft man sich aber durch einen höheren Anschaffungspreis für die Platine.
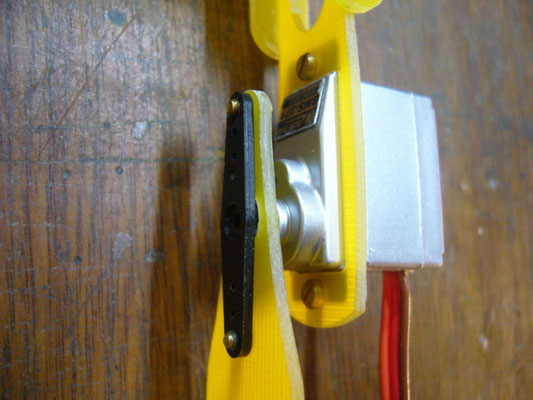
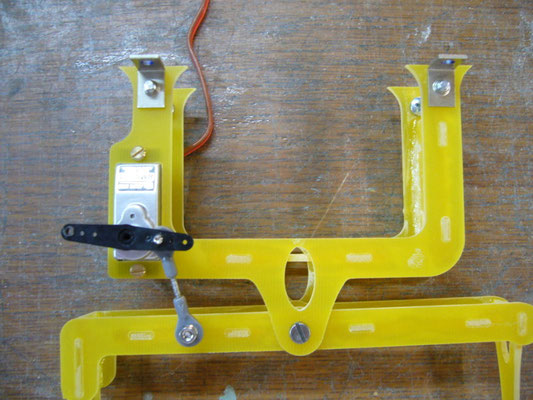
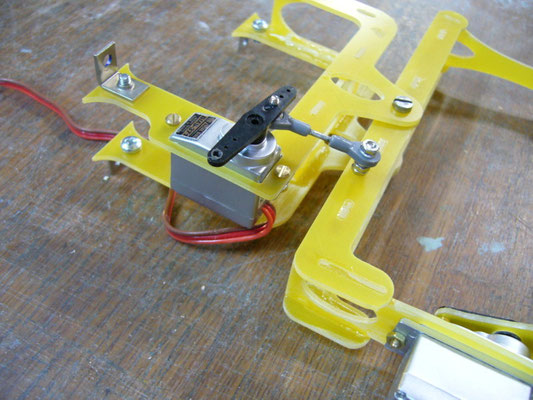
Weiterhin besitzt die Platine die Möglichkeit zum Anschluß von bis zu 5 Servos mit denen Zusatzfunktionen wie beispielsweise eine Nick/Roll Ausgleichsmechanik für eine Kamera realisiert werden können.
Alles wird über eine eigens dafür entwickelte Windowssoftware sehr komfortabel und bequem eingestellt und per USB Kabel mit Adapter an die FC2.0 übertragen. Das die Platine ein kleines Rechteck mit 50mm Kantenlänge zum Preis von schlappen 320 Euro ist sei hier nur am Rande erwähnt. Dazu kommt noch ein Drucksensor, ein weiterer Spannungsregler für die Servos und Beleuchtung und das Überspielkabel. Ein nicht ganz preiswerter Spaß, zugegeben.
Dazu muss man noch Regler, Motoren, Akku, Propeller und Empfänger addieren, von dem Rahmen ganz zu schweigen. Letzterer war mit das kleinste Übel. Nach ein wenig Recherche fand sich im Internet die Fräsdatei für einen Rahmen den ich mit ein bisschen Nachbearbeitung in 1,5mm GFK fräsen konnte. Der Rahmen, auch Frame genannt, besteht aus wenigen Teilen die zu vier Auslegern zusammen gebaut werden welche wiederum mit einer Mittelkonstruktion verbunden sind. Als Schutz der empfindlichen Elektronik dient ein Überrollkäfig aus GFK Teilen. Der Frame ist offen konstruiert, es gibt also keinen Schutz gegen Regen oder Feuchtigkeit. Dies ist ein deutlich negativer Punkt, schränkt es doch das Fliegen bei schlechtem Wetter stark ein da ein einziger Tropfen auf die falsche Stelle der Elektronik den Quadro zum Absturz bringen kann.
Nachdem der Rahmen gefräst war brauchte nur noch an sehr wenigen Stellen nachgefeilt werden damit alle Teile zueinander passten. Die Passgenauigkeit der Teile untereinander war perfekt und nachdem der Rahmen fertig gestellt war sah er schon ziemlich futuristisch aus. Da störte dann auch die Fräszeit von etwas über zwei Stunden nicht mehr, mit der Laubsäge hätte ich sicherlich länger gebraucht.
Die Drehzahlsteller waren da schon anspruchsvoller. Leider können hier keine einfachen Drehzahlsteller benutzt werden, die FC2.0 spuckt ihre Daten über einen sogenannten I2C Bus aus. Das ist ein recht betagter 2-Draht Bus der vom Elektronikhersteller Phillips mal zur Kommunikation innerhalb Geräten der Consumer Elektronik entwickelt worden ist. Leider wird dieses Protokoll nicht standardmässig von den handelsüblichen Drehzahlstellern verstanden. Es gibt zwar aus der Multikopterecke einige Anbieter mit speziellen Reglern, aber die sind relativ teuer und daher nicht wirklich interessant für mich. Außerdem reizte es mich einmal die vorhandenen Platinen umzubauen und neu zu programmieren. Findige Tüftler und Bastler haben nämlich die Platinen einiger Regler auseinander genommen, umgebaut und eine neue Firmware dazu programmiert. Mit ein weniger Suchen im Internet findet man entsprechende Seiten mit Umbauanleitung, Bildern und Software. Pikanterweise sind jedoch die Regler mit ein und der gleichen Bestellnummer bei den einschlägigen Anbietern in China nicht immer gleich. Ich habe nach mehreren Bestellungen insgesamt 3 verschiedene Versionen unter dem Lötkolben gehabt die sich teilweise durch vollkommen andere Layouts voneinander unterschieden.
Aber das muss man sportlich sehen, immerhin kann man hier einiges an Geld sparen das man anderweitig besser einsetzen kann.
Also ran an den Speck und Bauteile entlötet, Leiterbahnen aufgekratzt, Brücken aus Fädeldraht aufgelötet und eine 6 polige Buchse zum programmieren montiert. Nachdem ein sehr simpler Programmieradapter zusammengebaut wurde konnte die entsprechende Software gestartet, die neue Firmware geladen und der erste Drehzahlsteller programmiert werden. Als Programmiersoftware gibt es im Internet eine Freeware namens Ponyprog. Hier findet man auch den Schaltplan für ein kompatibles Adapterkabel welches dann mit den entsprechenden Punkten des Atmel Prozessors auf den Platinen verbunden wird. Die Software für die Drehzahlsteller haben alle unterschiedliche Firmwarenummern, das liegt daran das die Steller eine eigene Adresse haben unter der sie von der FC2.0 angesprochen werden. Daher ist es auch verständlich wenn sie eingangsseitig alle parallel geschaltet sind. Bei der konventionellen Lösung mit PWM bräuchte man für maximal 12 Steller dann auch 12 Pins am Prozessor und auch die entsprechende Rechenleistung um die PWM Signale zu generieren. So gehts einfacher.
Zurück zum Umbau, erstaunlicherweise funktionierte alles auf Anhieb. Der Adapter, der Umbau, die Firmware, alles klappte. War schon sehr interessant, ich weiss nicht wie weit mich ein Fehler zurückgeworfen hätte. Immerhin hatte ich keinerlei Vergleichsmöglichkeiten mit anderer funktionierender Hardware. Wenn was nicht geklappt hätte waren da viele Unbekannte gewesen an denen es hätte liegen können.
Nachdem die Drehzahlsteller erfolgreich geändert wurden bekamen sie eine neue Verpackung aus Schrumpfschlauch um die sehr filigranen Drähte zu schützen.
Als nächstes wurde der Empfänger umgebaut. Auch hier gibts eine besondere Eigenart, da die Empfangssignale sämtlichst von der FC2.0 verarbeitet werden wird hier ein Summensignal benutzt in dem alle Informationen enthalten sind. Es ist das Signal das aus der HF Stufe im Empfänger herausfällt bevor es durch den Demultiplexer in einzelne Signale aufgeteilt und den Servos zugeführt wird. Der von mir benutzte R16Scan konnte sehr leicht auf dieses Signal umgebaut werden, es war eine Sache von 2 Minuten. Danach stand an Buchse 8 das Summensignal zur Verfügung das an die FC2.0 zur Verarbeitung weitergeleitet werden konnte.
An der FC2.0 war recht wenig zu komplettieren. Es musste noch ein Schalter, ein paar Steckerleisten, der zusätzliche Spannungsregler und der Drucksensor aufgelötet werden.
Der Rahmen wurde an den Klebestellen gut angerauht und mit dünnflüssigem Sekundenkleber verklebt. Dazu kamen ein paar Schrauben und Abstandsbolzen aus Kunststoff. Lackiert wurde erstmal nichts. Die FC2.0 bekam nun ihren Ehrenplatz. In der Mitte des Rahmens thronend auf vier Lakaien aus Schwingmetallen, umrahmt von den vier Drehzahlstellern die in den Auslegern des Rahmens Platz fanden. Der Akku wurde provisorisch mit Kabelbindern unterhalb des Rahmens befestigt. Damit alles ausreichend Abstand zum Boden besitzt wurden noch schnell 4 Landefüsse gezeichnet, gefräst und montiert. Den Quadro habe ich übrigens als + Variante aufgebaut.
So gerüstet konnte der erste, sehr vorsichtige Flugversuch gestartet werden. Die Defaultparameter waren schon mal ein sehr guter Anhaltspunkt und der Quadrokopter schwebte nach sehr wenigen Nachjustierungen in der Software schon sehr stabil in der Werkstatt. Ein wenig lästig war auf Dauer die Tatsache, dass man jedesmal wieder den Quadro an den Rechner stöpseln musste um die Parameter zu überspielen. Hier musste auf kurz oder lang was anderes her...
Bei den kommenden Probeflügen (wegen der widrigen Temperaturen in der Werkstatt) stellte sich dann auch schnell das Bedürfnis nach kraftvoller Beleuchtung für den ersten, "richtigen" Flug ein. Diesem Mangel wurde durch Montage dreier ultraheller Luxeon Emitter auf Kühlblech mit Konstantstromquelle begegnet. Mit einem Schalter an der Funke konnten diese LED nun nach kurzer Programmierung (ein Kästchen anklicken) eingeschaltet werden.
Ich entschied mich für Rot für links, grün für rechts und weiss für vorne. So gerüstet gings dann zum ersten Testflug im Freien, diesmal in einem nahen Feld.
Nachdem ich genügend Abstand zu den angrenzenden Häusern hatte konnte ich den Quadro mal in freier Wildbahn testen.
Schon sehr beeindruckend wie stabil das Teil in der Luft lag und sich vor allem selbst stabilisierte.
Der Virus Multikopter hatte mich nun vollends infiziert. Beim surfen war mir eine weitere Bauart ins Auge gefallen, ein Trikopter mit servogelenktem Heckausleger. Auch diesen hatte ich schnell gebaut, die entsprechend Baubeschreibung wurde bereits hier veröffentlicht. Da ich auch hier das Problem mit der Programmierung und dem völlig unzureichenden Kupferkabel hatte, musste Abhilfe her. Ich habe mich hier für Funkmodule mit dem Namen XBee entschieden die es in verschiedenen Ausführungen gibt. Meine haben 50mW, sind aber gedrosselt auf die in Deutschland legalen 10mW. Die 50mW sind gut für 1,6km Reichweite, 10mW entsprechend weniger. Nach dem Studium der Datenblätter waren schnell 4 Drähte zur FC2.0 gezogen, die Module programmiert und schon stand die Verbindung. Nun können Daten während des Fluges gelesen und auch geschrieben werden. Sehr praktisch das die Software das auch unterstützt ohne das man Angst haben muss das der Quadrokopter bei den richtigen Werten abschmiert. Natürlich sollte man hier wissen was man tut und Einstellversuche dieser Art nur machen wenn man genügend Sicherheitsabstand einhält, ein falscher Parameter führt natürlich auch hier zum Absturz.
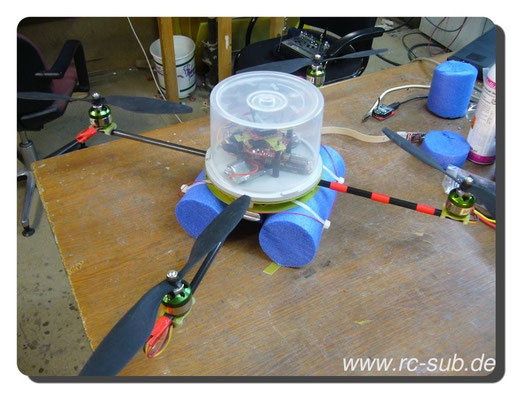
Das selbstgefräste Chassis des Quadrokopters aus dem Internet konnte mich aber auf Dauer nicht überzeugen. Es war viel zu schwer und auch nicht verwindungssteif. Die Ausleger konnte man gegeneinander verdrehen sodass die Motoren in einem gewissen Winkel stehen blieben was natürlich zu falschen Flugparametern führt. Es musste ein neuer Rahmen her. Da ich keinen Wert auf Schnörkel lege und schon garnicht irgendwem eine Heidenkohle in den Rachen werfen will für etwas das ich selbst bauen kann, entschied ich mich dafür einen Rahmen selbst zu bauen. Ich wollte hier basierend auf einer runden Grundplatte unterschiedliche Konstruktionsmerkmale verschiedener Rahmen verbauen, nichts exotisches und nicht wirklich neues. Vor allem wollte ich aber einen Schutz gegen Regen haben, die offenen Konstruktionen sind da sehr empfindlich.
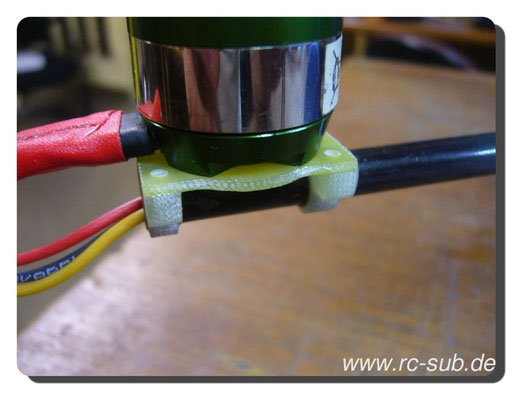
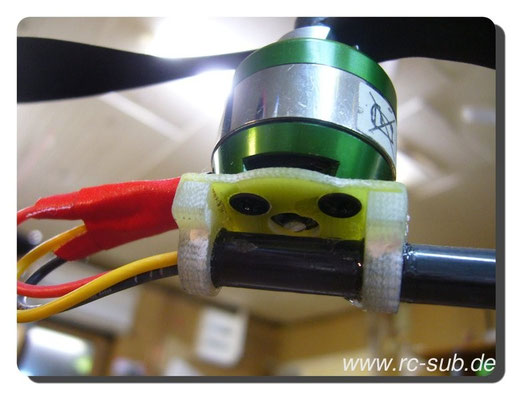
Die runden Grundplatten wurden also mit einem Durchmesser von 140mm gewählt, das entspricht dem Durchmesser einer CD Spindel. Ein billiges und leichtes Gehäuse mit schnellem Zugriff durch Bajonettverschluss und im Crashfall sehr einfach zu ersetzen. Zwischen die beiden runden Platten wurden 4 Ausleger mit 4x M2 Schrauben montiert. Diese Ausleger bestehen jeweils aus 8mm Kohlefaserrohr aus dem Drachenbau, zwei Haltern innerhalb der Scheiben und 2 Haltern motorseitig. Nachdem die Rohre auf gleiche Länge gebracht wurden konnten die 4 Halter an die richtige Position geschoben werden. Begonnen wurde hier mit den Haltern an den äusseren Enden. Diese wurden sehr sorgfältig mit dem CFK Rohr verklebt. Leider konnte ich nur pultrudiertes CFK Rohr bekommen, es besteht aus unifilar laminierten Fäden die als alle in eine Richtung gehen. Wird solch ein Rohr an den Enden gegeneinander verdreht kann es vorkommen das es sich an einer Stelle der Länge nach spaltet und nutzlos wird. Um dies zu vermeiden muss entweder ein Rohr in das Rohr geklebt werden oder eben irgendwelche Ringe an den Enden über das Rohr. Besser wären natürlich irgendwelche CFK Rohre aus dem Helisektor, aber die sind recht teuer.
Diese Ringe sind hier als 5mm breite Halter aus GFK ausgeführt. An den Enden werden die Halter durch eine kleine gefräste Platte miteinander verbunden auf denen der Motor montiert wird. Alles ist gut angerauht und mit Sekundenkleber verklebt. Das spart Gewicht und ist mehr als ausreichend. Leider musste ich im nachhinein feststellen das die vier Bohrungen bei den zwischenzeitlich angeschafften Roxxy Motoren nicht immer gleich gedreht sind. Das hat zur Folge das der Kabelauslass bei einem Motor nun nach hinten, und bei drei anderen zur Seite ist. Tolle Wurst, sieht man natürlich erst wenn alles zu spät und verklebt ist...
Während des Baus musste ich mich entscheiden ob ich wieder die + Variante nehme oder dieses Mal die x Variante wähle. Da ich bisher noch wenig x Varianten gesehen hatte gab ich im Gegensatz zum ersten Quadro diesmal der x Variante den Vorzug.
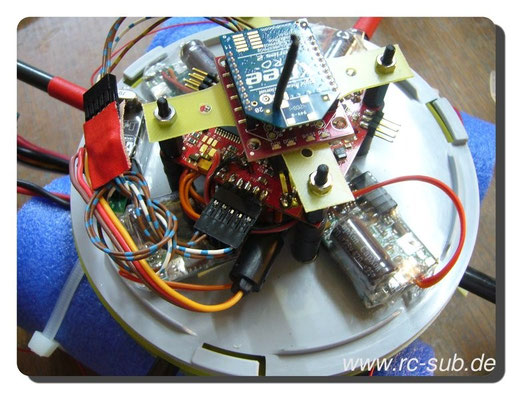
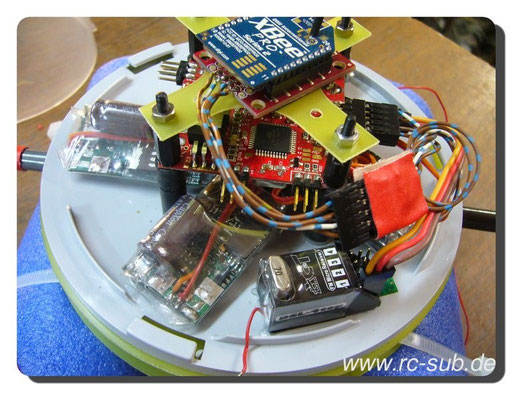
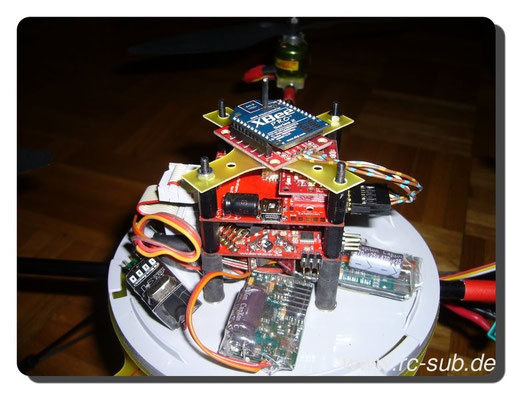
Die viel zu dicken Zuleitungen zu den Motoren wurden auf ein sehr kurzes Maß gekürzt und mit gutem Silikonkabel von Nessel verlängert. Es ist 0,75qmm mit dünner Isolierung und wurde durch die CFK Rohre gezogen. Die Drehzahlsteller sind innerhalb der CD-Spindel auf doppelseitigem Klebeband montiert und zeigen alle Richtung Spindelmitte um Kabel zu sparen. Die billigen Elkos habe ich gegen gute EKR Typen getauscht und auch der Platine liegend montiert. So konnte etwas Länge eingespart werden und die Spindel geht noch zu. Darüber hängt wieder die olle FC2.0 mittig auf Schwingmetallen und darüber die Xbee mit keck nach oben abstehender Antenne.
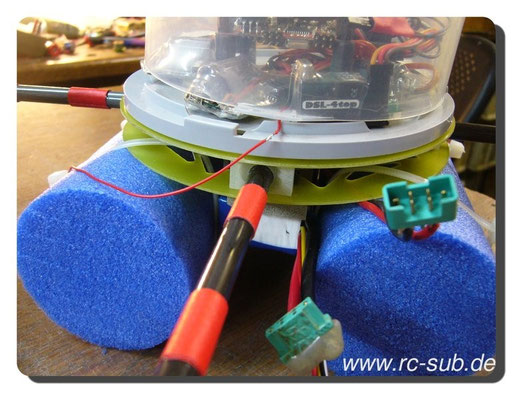
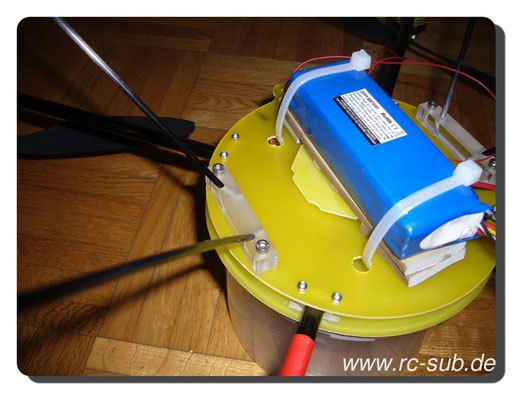
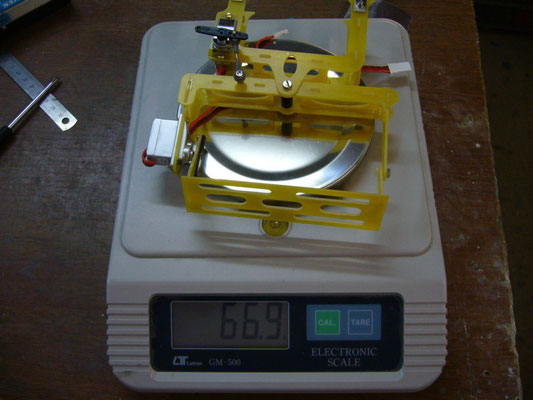
Den Akku habe ich erstmal wieder provisorisch mit Kabelbindern befestigt. Flankiert wurde er rechts und links testweise mit zwei 10cm langen Stücken einer Poolnudel, einer Schwimmhilfe für Kinder. Hierdurch hatte ich einen gewissen Stossdämpfer beim Aufsetzen und so wurden Akku und Quadro geschützt. Später sollte er ersetzt werden durch ein CFK Rohr / Makrolon Landegestell welches für die nötige Distanz zum Boden sorgt und eventuell Raum für eine Kamera bietet. Somit war der "neue" Quadrokopter erstmal mechanisch fertig gestellt und konnte programmiert werden. Das Abfluggewicht des Quadros lag inklusive einem 2200mAh Lipo Akku bei 838g, sehr wenig wie ich finde. Die erzielten Flugzeiten sind bei dieser Konfiguration nicht schlecht, ich komme auf 14 Minuten Flug.
Als Konfiguration habe ich die Daten eines Freundes genommen dessen Quadrokopter wir wenige Tage zuvor gebaut und eingestellt hatten. Er hatte mein altes gefrästes Chassis übernommen weil er mehr Wert auf Optik legt als ich. Nachdem die Einstellarbeiten an seinem Quadro beendet waren flog das Teil sehr gut. Besser als mein alter Quadro, und so beschloss ich auf seinen Daten auf zu bauen.
Ich hatte bei seinem Quadro zum ersten Mal von der Möglichkeit gebrauch gemacht die korrekten Settings zu erfliegen. Hierbei werden die einzustellenden Parameter auf einen freien Proportionalkanal des Senders gelegt und können während des Fluges angepasst werden. Bei meinem ersten Quadro hatte ich immer noch alles von Hand in der Software eingetragen, geändert, Quadro angestöpselt, getestet, verworfen und alles wieder von vorne... Nun ging das nur durch verstellen des Schiebepotis, sehr lecker! Die ermittelten Werte können in einem Display in der Software abgelesen und als festen Parameter dann eingetragen werden.
Auf diese Weise konnte sehr schnell die FC2.0 an den neuen Quadro angepasst werden.
Ich hatte zwar von Anfang an den Drucksensor eingebaut, aber weder die Funktion noch die genaue Einstellprozedur verstanden. Leider habe ich auch niemanden in der Nähe der mir bei den Einstellarbeiten beratend zur Hand gehen konnte und in den einschlägigen Foren werden Newbies gerne mal schroff auf seitenweise Wiki- und andere Artikel verwiesen anstatt mit wenigen Sätzen die Zusammenhänge zu erklären.
Nach ausgiebigem Studiums der Literatur konnte ich dann den Sensor schon recht gut einstellen, die Höhe hielt er bis auf +-einen Meter. Das scheint wohl ein recht guter Wert zu sein.
Bei den ganzen Flügen mit der CD Spindel ist mir immer aufgefallen das es doch ein recht lautes Brummen gibt was ich als sehr störend empfunden habe. Mein Trikopter ist hingegen deutlich leiser. Ist ja auch kein Kunststück, der Resonanzraum der Spindel und vor allem auch der Pool Nudeln ist beträchtlich.
An dem Wochenende über Ostern stand unser alljährliches Treffen auf einem Campingplatz bei Hameln mit mehreren befreundeten Familien an. Hier wollte ich den Quadro feinjustieren und ausgiebig prüfen. Der Platz dazu ist ideal, weite Felder ringsrum und keine bewohnten Häuser in Reichweite. Leider war das Wetter nicht ganz so prall, es windete teilweise sehr stark. Aber das machte dem Quadro recht wenig aus, dafür das es so windig war blieb er mit eingeschaltetem Höhenregler erstaunlich stabil in der Luft stehen. Man musste nur leicht gegen den Wind nicken um nicht ab zu driften. Um auch abends und nachts fliegen zu können hatte ich im Vorfeld noch an jeden Ausleger eine ultrahelle LED montiert. Dabei hatte ich zwei grüne nach vorne und zwei blaue nach hinten. In den recht engen CFK Rohren war noch ein bisschen Platz über sodass ich die Zuleitungen noch durch die Rohre ziehen konnte. Die LEDs sind so verschaltet das jeweils eine grüne LED mit einer blauen LED in Reihe liegt und beide Stränge parallel am Schaltausgang der FC2.0 liegen. Die beiden entsprechenden Ausgänge liefern durch Einsatz eines Widerstandes einen maximalen Strom von 100mA, dieser teilt sich nun auf in jeweils 50mA für rechten und linken Strang. Die 50mA sind zwar etwas zu viel für die LEDs, aber wenn die irgendwann mal den Geist aufgeben sollten werde ich die paar Cent gerade noch so verkraften. Bis dahin freue ich mich an diesen wirklich fetten Strahlern.
Die CFK Rohre stellten sich bei allen Flügen als gute Wahl heraus. Sie lassen sich zwar leicht in sich verdrehen aber nur sehr schlecht verbiegen. Ein weiterer Vorteil ist die Möglichkeit defekte Rohre nach einem Absturz einfach durch ein Ersatzrohr auszutauschen. Es muss zwar in diesem Fall die Verkabelung aufgetrennt werden, aber das Problem hat man bei allen Rohren sobald da Kabel durchlaufen. Vorteil ist halt das geringe Gewicht.
Ich musste allerdings feststellen das die Rohre sehr stabil sind. Zwischenzeilich hatte ich einige Abstürze die ich mir nicht erklären konnte und die auch nichts mit Flugfehler zu tun hatten. Es stellte sich heraus das die Wicklung in einem der Motoren einen Wackler hatte und somit bei passenden Vibration der Quadro abschmierte da ein Motor sporadisch ausfiel. Gottseidank waren die Abstürze immer in geringer Höhe, aber so passierte an der Elektronik kein Schaden und auch die CFK Rohre blieben unbeschädigt.
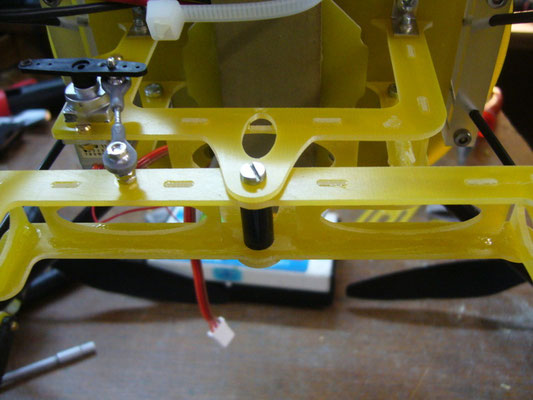
Irgendwann began mich das Design des Quadrokopters zu langweilen. Einige Veränderungen waren auf die Schnelle vorgenommen worden und so sah das Chassis dann auch aus. Auch sollte es lackiert werden, es war also wieder Zeit über was Neues nachzudenken. Die Rohre sollten diesmal tatsächlich aus CFK Rohren vom TRex bestehen, die Halteböcke mussten entsprechend von der Dimensionierung angepasst werden. Nach kurzer Überlegung wurde aber das Konzept noch einmal überdacht und zugunsten eines Klapprahmens verworfen. Die Arme werden hierbei innerhalb der Centerplate drehbar gelagert und an den äusseren Enden der Centerplate mit Halteklammern festgehalten. Das diese Klammern sehr stabil und fest sein müssen versteht sich von alleine. Ich habe sie aus 8mm POM (Polyoxymethylen) gefräst, ein weisser Kunststoff der sehr gute Gleiteigenschaften bei geringem Schwund und Wasseraufnahme aufweist und die doch recht dünnwandigen Heckrohre nicht durchscheuert. Um die passende Straffheit zu finden waren einige Fräsversuche nötig, aber irgendwann hatte ich das passende Maß gefunden und die Rohre mussten mit recht hohem Kraftaufwand aus der Schelle gezogen werden. Die Schelle selbst erinnert an eine Rohrschelle zum verlegen von Elektrikerrohr.
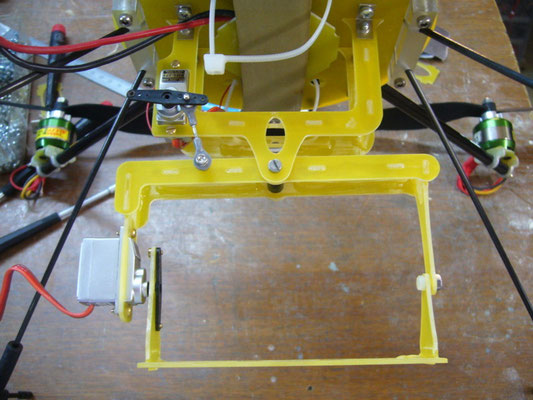
Die Erkenntnisse bezüglich Platzierung der einzelnen Komponenten beim ersten Quadrokopter gewinnen konnte habe ich in die Centerplates für den neuen Rahmen einfliessen lassen. So wurden direkt entsprechende Aussparungen zur Gewichtserleichterung vorgesehen, genauso wie ein Halteauge für die Antenne, Langlöcher für den Klettverschluß des Akkus und passende Bohrungen für das Kameragestell.
In der Zwischenzeit kam dann auch meine langersehnte GPS Platine an. Natürlich musste die sofort ausprobiert werden. Bis auf kleinere Anpassungen der Schalter am Sender wurden die Defaultparameter nicht geändert und einfach so übernommen. Ein erster Probeflug auf dem Hof zeigte dann schon ein sehr ansprechendes Verhalten. Nachdem die Höhe durch den barometrischen Höhensensor sehr gut gehalten wurde habe ich den Quadrokopter mal ein paar Meter von mir weg geflogen und dann den entsprechenden Schalter auf "Coming Home" umgelegt. In dieser Schalterstellung wird das GPS auf den Modus "GPS_MODE_HOME" umgeschaltet und der Quadrokopter versucht zu dem Punkt zu fliegen den er beim Einschalten hatte. Und tatsächlich, der Quadrokopter bewegte sich mit deutlichem Nick zu dem Punkt an dem ich ihn gestartet habe. Hierbei ist es natürlich wichtig das die Höhenregelung einwandfrei funktioniert und man muss wissen das keine Hindernisse im Weg sein dürfen. Die kürzeste Verbindung zwischen zwei Punkten ist immer noch eine Gerade, auch wenn ein Baum dazwischen steht ;-).
Das GPS kennt ausser dem GPS_MODE_HOME noch GPS_MODE_FREE und GPS_MODE_AID. Im FREE Modus ist das GPS quasi deaktiviert und hat keinen Einfluss auf die Steuerung des Quadrokopters. Der AID Modus hingegen sorgt für das sogenannte "Position Hold". Hierbei wird die Position gehalten und äusseren Einflüsse wie Wind oder Drift wird gegengesteuert.
Zurück zum neuen Rahmen.
DER START













ZWEITER VERSUCH








ENDVERSION











