Nachbau eines Open Source Trikopters
Einleitung
Seit vielen Jahren baue ich U-Boote. Es war das, was sich von vielen Exkursionen in die unterschiedlichsten Sparten des Modellbaus am längsten gehalten hat. Darunter gab es einige Rennboote, Autos mit Elektro und Verbrenner, Panzer, Überwasserschiffe, Flugzeuge und so weiter und so weiter.
Vor einigen Jahren wurde ich dann noch mit dem Hubschraubervirus infiziert. Dies hatte zur Folgen das ich mir einen LMH, einen Quick EP10, einen T-Rex und zum Schluss einen Walkera 4#3b zulegte. Hubschrauber waren sehr interessant da der Adrenalinpegel regelmäßig stieg. Leider war der umgekehrt proportional zum Inhalt meiner Geldbörse. Der sank nämlich stetig gegen Null, irgendwie hatte ich kein Glück mit der Lebensdauer bei den Drehflüglern. Böse Zungen nennen dies auch mangelndes Talent. Am längsten hielt noch der LMH, ich habe hier allerdings einen Haufen Geld in Tuningteile versenkt und so den Wert vervielfacht. Einige Teile habe ich selbst angefertigt, einige einfach stumpf gekauft. Mein Maschinenpark aus der U-Boot Sparte erlaubt mir so manche Kleinigkeit selbst herzustellen, dazu zählen u.a. Drehbank und CNC Fräse. Beim einem U-Boot Treffen in Großbreitenbach/Thüringen tauchte einer der Kollegen mit einem äußerst interessanten Fluggerät auf das ich in dieser Form noch nie gesehen hatte. Natürlich waren mir bei meinen Streifzügen nach Ersatzteilen des öfteren diese X-UFOs aufgefallen und einer der Arbeitskollegen hatte sich auch mal so ein Ding zugelegt, allerdings war die Flugleistung mehr als bescheiden. Kein Grund hier Geld zu investieren.
Das Teil hier auf dem U-Boot Treffen hingegen war vollkommen anders. Kräftige Brushless Motoren, ein Kohlefaserrahmen und ein Datenblatt das bemerkenswert war. Sensoren die automatisch die Lage kontrollieren und halten, GPS, Kompass, Höhensensor uswusf. Das alles war natürlich nicht preiswert, aber ich war sofort verliebt und beschloss auf kurz oder lang so was auch zu bauen.
Erste Schritte
Zuhause angekommen wurde also erstmal wieder das Internet durchforstet. Irgendwo fand ich einen Link zu einem außergewöhnlichen Modell eines Tricopters. Dieses Fluggerät hat, der Name lässt es unschwer erkennen, nur 3 anstatt 4 Rotoren und wurde in kompletter Eigenarbeit von dem Diplombiologen William Thielicke aus Bremen entworfen. Ich muss gestehen das ich anfangs ein wenig Skepsis hatte, immerhin ist das Teil die Arbeit eines Einzelnen und Erweiterungen und Verbesserungen von daher primär von seinem Wohlwollen und seiner Zeit abhängig. Aus diesem Grunde beschloss ich erstmal einen Quadrokopter auf Basis der Mikrokopterleute zu bauen der auch nach relativ kurzer Zeit fertig gestellt war. Allerdings wurde der Wunsch nach einem Trikopter immer größer und so bestellte ich nach einigem Überlegen die entsprechenden Sensoren und CPU bei Lipoly.de. Nachdem ich entsprechende Seiten im Internet ein wenig studiert hatte konnte ich mit meinem laienhaften Verständnis feststellen das William sehr hochwertige Sensoren für seine Elektronik verbaut hatte die sich hinter Leistungsfähigkeit anderer Produkte kaum verstecken brauchte. Einzig die Sonderfunktionen wie GPS, Kompass, Höhensensor etcetc fehlten hier, aber das war auch nicht der Anspruch den dieser Trikopter hatte. Was mich sehr stark faszinierte war die Möglichkeit hier Dinge selbst zu bauen, es wurde nur auf wenige fertige Teile zurückgegriffen und die Elektronik konnte so gestaltet werden wie man es wünscht. Ich wollte auch unbedingt Lösungen versuchen die halt nicht vorgekaut und einfach nur fertig zu kaufen sind auch wenn es etwas länger dauert diese Dinge ans laufen zu bekommen
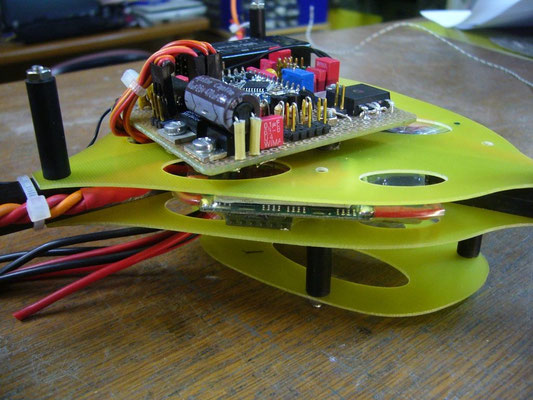
Die Hauptelektronik
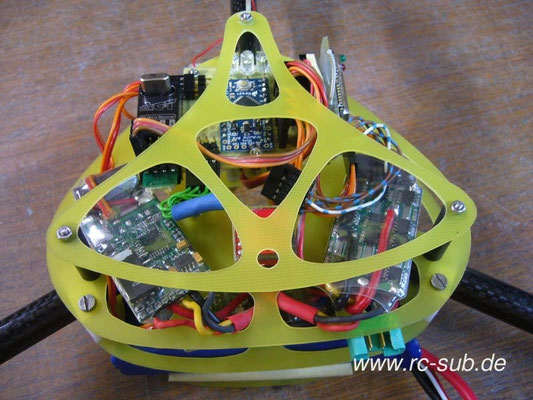
Der Trikopter, sein Erfinder William Thielicke taufe ihn auf den etwas skurrilen Namen "Shrediquette", ist komplett im Blog von William dokumentiert. Sogar der Quellcode des Betriebssystems ist offen und in einem Basicdialekt geschrieben sodass eigene Erweiterungen vorgenommen werden können sofern man dazu in der Lage ist. Als Prozessor wird ein Mini Arduino verbaut, es ist ein Atmel Prozessor der mit ein wenig Hardware auf einem kleinen, und recht preiswerten Platinchen Platz findet und so in eigene Schaltungen eingesetzt werden kann. Die Sensoren die hier benutzt werden sind sehr hochwertig. Es sind MEMS Gyros die driftfrei und temperaturunempfindlich sind. Leider schlägt sich das auch im Preis nieder, die Teile kosten pro Stück um die 56 Euro und man braucht einen für jede Achse. Komplettiert wird das Set mit einem 2 Achs Beschleunigungssensor.
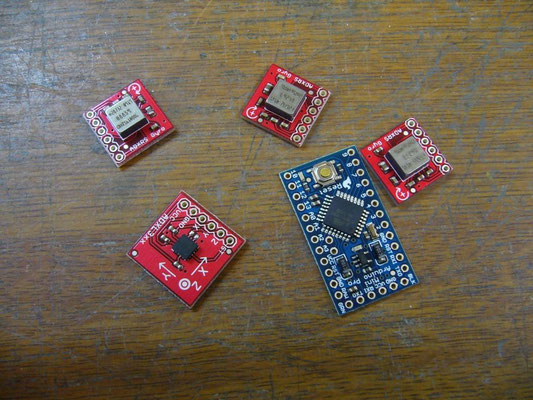
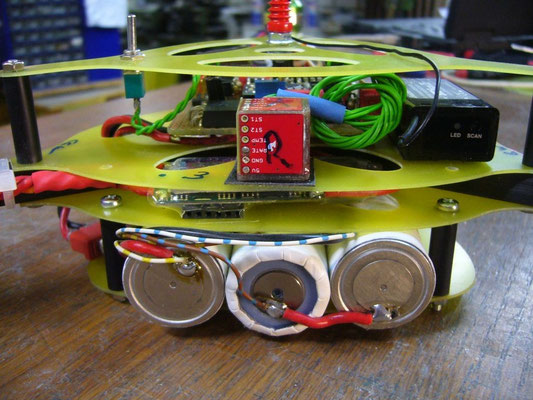
Alle vier Sensoren werden nach einem besonderen Schema zu einem sogenannten IMU Würfel zusammengesetzt und später mit Kabeln mit der Hauptplatine verbunden. Sie sorgen dafür das der Trikopter später die Waage hält, und das tut er einwandfrei.
Zuvor muss der Arduino allerdings noch um einige externe Bauteile erweitert werden damit die Funktion gegeben ist.
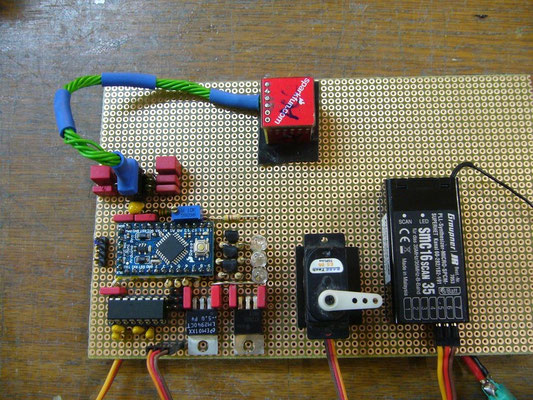
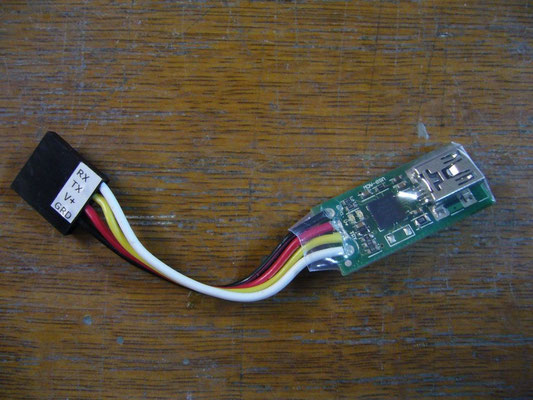
Da ich mich zuvor noch nie mit solchen Teilen beschäftigt hatte wollte ich erst einmal "Kontakt" mit der CPU aufnehmen. Ich habe dazu die CPU auf eine Lochrasterplatine gelötet und über drei Drähte mit meinem Notebook verbunden. Da ich modernere Notebooks besitze fehlt es dort an "echten" seriellen Schnittstellen und ich hatte die Verbindung über einen USB/seriell Adapter versucht herzustellen. Ich weiß nicht ob es am Adapter lag oder an meiner Unfähigkeit, tatsächlich habe ich einen halben Tag gebraucht um eine Verbindung herzustellen. Nichts funktionierte, ich baute zusätzlich noch einen Pegelwandler ein aber auch hier keine Verbindung. Völlig entnervt nahm ich ein recht altes Notebook mit nativer serieller Schnittstelle und spielte dort die gleiche Software auf. Nachdem ich mich mit der seriellen Schnittstelle verbunden hatte funktionierte alles sofort und auf Anhieb. Ich habe später nochmal alles kontrolliert, es lag wirklich nur an dem USB/seriell Adapter der aber zweifelsfrei funktionierte da ich dort auch andere Platinen schon erfolgreich mit angesprochen hatte.
Als der Zugang zum Prozessor hergestellt war konnte ich erstmals die Firmware des Trikopters auf den Arduino programmieren, die Prozedur dauerte nur wenige Augenblicke und verlief fehlerfrei. Nun war ich in der Lage über die von William eigens zu diesem Zweck programmierte grafische Oberfläche genannt GUI Zugang zum Prozessor zu erlangen und die nötigen Parameter anzupassen. Alles sehr durchdacht und sehr schlüssig, Respekt! Die Hauptplatine wurde Schritt für Schritt um die notwendige Hardware erweitert. Diese ist aber überschaubar. Es sind ein paar Transistoren für die Signal LEDs die ich auf die Ausleger platzieren wollte, Filter für die Sensoren, ein paar Spannungsregler und ich habe noch einen BTS555 drauf gebaut mit dem ich die Hauptspannung schalte um einen normalen Kippschalter zu entlasten. Dies ist ein recht moderner Leistungshalbleiter mit eingebauten Schutzschaltungen und beeindruckenden Leistungsdaten. Um ihn zu schalten genügt es einfach einen entsprechenden Pin des Transistors auf Masse zu ziehen. Auf diese Weise habe ich weder Einschaltfunken beim anstecken des Akkus noch verbrannte Kontakte eines Kippschalters.
Modifizierung der Drehzahlsteller
Für jeden der drei Motoren gibt es einen eigenen Drehzahlsteller. Da diese Drehzahlsteller recht schnell sein müssen um Drehzahländerungen sauber zu reproduzieren, sind sie mit einer I2C Schnittstelle ausgestattet. Die I2C Schnittstelle ist ein recht betagter 2Draht Bus der mal von Philips entwickelt wurde um Leiterbahnen innerhalb elektrischer Geräte zu sparen. Im Prinzip gibt es hier 3 Möglichkeiten: Als erste Möglichkeit kauft man sich einen speziell dafür angefertigten Steller mit eingebauter I2C Schnittstelle. Diese sind auch als Bausatz zu haben. Leute ohne Sinn fürs Selbermachen greifen hier zu einer fertigen Varianten die natürlich den Vorteil hat sofort einsetzbar zu sein. Die zweite Möglichkeit besteht darin, eine Vorschaltplatine vor handelsübliche Drehzahlsteller zu schalten. Auch hier gibt es verschiedenste Anbieter bei denen man sich bedienen kann. Diese Platine wandelt ganz grob gesagt das I2C Bus Signal in eine reglerverträgliche PWM um.
Die letzte Variante ist Modifikation von sehr preiswerten Regler aus China. Ich habe letztere Variante praktiziert. Im Internet finden sich zuhauf Änderungsanleitungen die den genauen Ablauf beschreiben. Dies detailliert zu erklären würde den Rahmen dieses Berichtes sprengen. An dieser Stelle sei wohl erwähnt das es recht viel Variationen an Drehzahlstellern zu geben scheint die alle unter der gleichen Bezeichnung verkauft werden. Ich selbst habe schon von ein und der gleichen Reglerbezeichnung 3 unterschiedliche Bauarten gefunden. Zwei davon unterscheiden sich nur durch etwas andere Bauteile, einer hingegen hat ein vollkommen anderes Layout. Die Modellbezeichnung (und auch die Bestellnummer) ist bei allen drei hingegen gleich! Man muss also gewillt sein gegebenenfalls ein wenig im Internet auf der Suche nach der passenden Firmware und Umbauanlietung zu verbringen.
Wie auch immer, auf jeden Fall habe ich die Regler mit einer zusätzlichen Buchsenleiste ausgestattet um sie immer wieder umprogrammieren zu können. Hierbei wird eine modifizierte Firmware aufgespielt die die Ausgänge des internen Prozessors anders verschaltet und eine Kommunikation via I2C zur Verfügung stellt. Der Umbau ist stellenweise nicht ganz einfach und es benötigt auch relativ viel Zeit um alle Änderungen durch zu führen, aber es ist machbar. Die ersten Regler für meinen Quadrokopter habe ich noch mit Hilfe einer Lupe geändert. Das war allerdings für mich eher hinderlich als hilfreich. Die 6 Regler die ich in einem Rutsch für den Trikopter geändert hab (drei waren zur Reserve gedacht) hatte ich in weniger als die Hälfte der Zeit geändert die ich für die vier Regler meines Quadrokopters benötigte.
Nachdem die Regler geändert waren wurden sie überprüft und in Schrumpfschlauch verpackt. Jeder Regler hat eine eigene Hardwareadresse die im Programm vorgegeben ist. Über diese Adresse ist jeder Regler separat von dem Arduino ansprechbar obwohl alle Eingänge der Regler parallel geschaltet sind.
Die Motoren
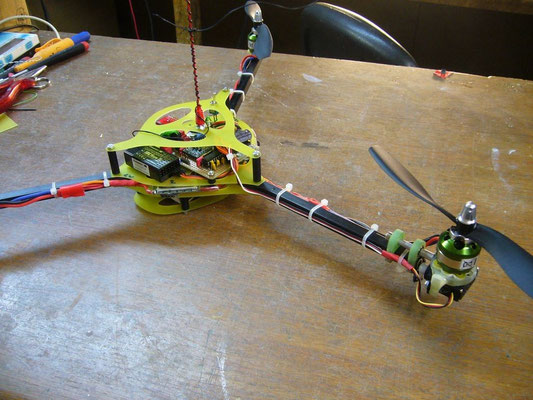
Eigentlich hatte ich für den Trikopter ursprünglich billige Motoren aus China vorgesehen. Gottseidank waren die zum benötigten Zeitpunkt nicht lieferbar sodass ich nach einer Alternative Ausschau halten musste. Ein weiterer Motor der zur Auswahl stand war ein Roxxy 2824-34. Glücklicherweise war dieser Motor bei meinem Modellbauhändler verfügbar und ich konnte recht schnell drei Stück abgreifen. Die Motoren wurden noch schnell angepasst und die Welle am unteren Fußpunkt abgeflext um nicht ein zusätzliches Loch in den Ausleger bohren zu müssen und ihn dadurch zu schwächen. Ein anderer Grund für das Abflexen der Welle liegt darin, dass in Fall einer etwas harten Landung die Welle auf den Boden aufschlagen und dadurch die Glocke aus dem Motor gedrückt werden kann.

Als Propeller habe ich bewährte EPP1045 benutzt. Diese sind zwar nicht der Olymp der Propeller, aber recht preiswert und vor allem in beiden Drehrichtungen verfügbar. Ein weiterer Punkt ist das geringe Gewicht das dazu führt das das Trägheitsmoment ebenfalls gering bleibt. Für eine schnelle Regelung ist das unabdingbar, und die ist hier sehr wichtig. Die Nabe hat nur 3mm, musste also auf 5mm aufgebohrt werden was sich aber als recht einfach und ausreichend präzise herausstellte. Die Motoren laufen wie ein Uhrwerk und vibrationsfrei. Im Zusammenspiel mit den modifizierten Reglern laufen diese perfekt und ohne jegliche Probleme an.
Das Chassis
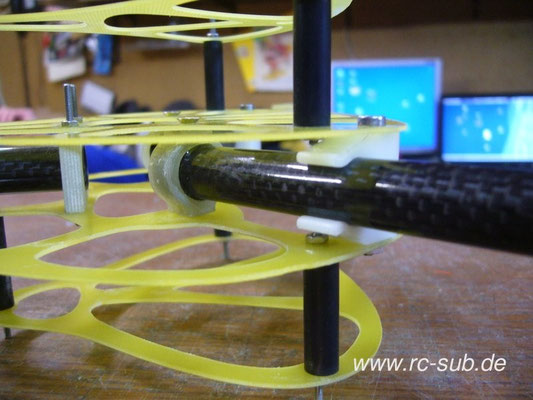
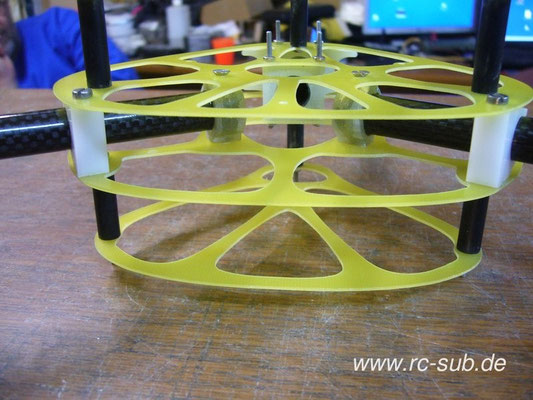
Für meinen Quadrokopter habe ich ein Chassis verwendet das ich in einem Internetforum gefunden habe. Sehr stylish und sehr chic, gefräst habe ich es aus 1,5mm GFK an dem meine Fräse knapp 2 Stunden rumkaute. Allerdings sind die Ausleger nicht steif genug, man kann sie in sich verdrehen. Das führt dann beim Beschleunigen dazu das der Quadrokopter in eine Richtung weggiert. Das originale Chassis des Tricopters, auch Frame genannt, besteht hingegen aus sehr wenig Komponenten.



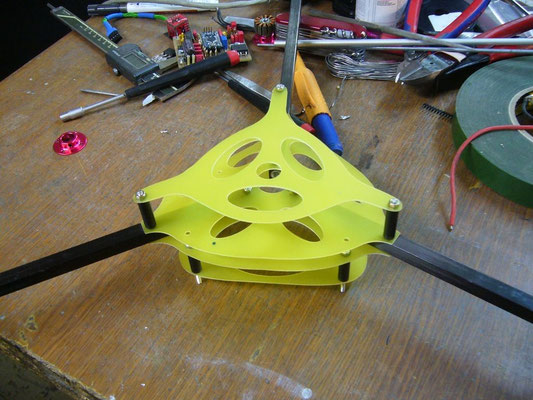

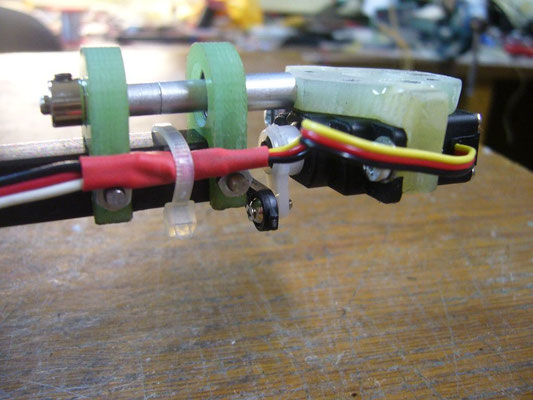
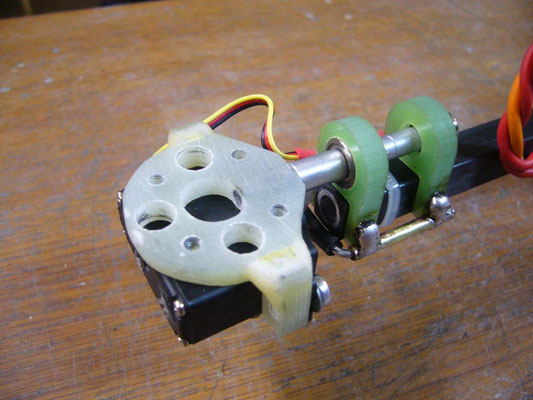
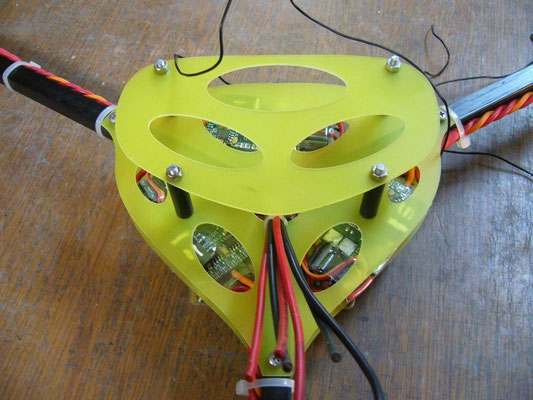
Die Arme wurden aus Kohlefaservierkantmaterial vom Chinesen hergestellt. Hier musste ich feststellen das diese zwar sehr schwer zu verdrehen sind, an der dünnsten Stelle allerdings schnell reißen. Die Erklärung liegt hier im unidirektionalen Material, die Stäbe bestehen aus einzelnen Fasern die alle in eine Richtung verlaufen. Um diesen Mangel auszugleichen habe ich kleine Stücke aus Alurohr in die Bohrung der Arme eingeklebt. Diese Aluröhrchen habe ich zuvor gerade so lang geschnitten wie ich es brauche und anschließend am Schleifstein sehr grob angeschliffen damit der Kleber besser hält. Die Länge der Röhrchen ergab sich aus der Breite des Motors und dem Abstand der beiden Schrauben mit denen der Arm mit dem Chassis verbunden ist. In einer späteren Ausbaustufe will ich dieses Konstrukt noch gegen Heckrohre vom TREX 450 tauschen um so noch mehr Gewicht zu sparen. Das Chassis selbst habe ich aus 1mm GFK gefräst. Hierzu gibt es in der Dokumentation von William eine Vorlage die ich zugrunde nahm und um einige ovale Ausschnitte erleichterte. Es besteht aus 4 Platten. Zwei Platten die die Arme miteinander verbinden, eine Platte darunter um den Akku einzuklemmen und eine Platte drüber die quasi ein Dach bildet. Die untere und obere Platten sind mit Stehbolzen verbunden, dadurch wird eine unglaubliche Steifheit erzeugt. Ich war blass erstaunt als ich zum ersten Mal versucht habe das Chassis zu verbiegen. Sehr beeindruckend und nicht mit dem Chassis des Quadro zu vergleichen. Es sieht allerdings auch nicht ganz so chic aus, das muss ich der Vollständigkeit halber erwähnen. Da die Kopter jedoch kein Vorbild haben ist mir das ziemlich egal, es ist ein reines Funktionsmodell. Die "normalen" Chassis der Multikopter sind größtenteils für Motoren mit vielfachen von 2 ausgelegt. Dies ist begründet im Drehmomentausgleich der Motoren die hierzu zu gleichen Teilen im Uhrzeigersinn und gegen den Uhrzeigersinn laufen. In Summe ist das Drehmoment dann Null und daher giert der Kopter nicht weg. Beim Trikopter ist das nicht der Fall, je nach verwendeten Propellern wird der Kopter nach rechts oder links durch das unsymmetrische Drehmoment weggieren. Um dies zu vermeiden wurde der nach hinten gerichtete Ausleger in Williams Design von ihm modifiziert und der darauf montierte Motor schwenkbar gelagert.
Die Mechanik hierzu ist ein wenig aufwändig und ich kann nur den guten Rat geben beim Nachbau auf peinlichste Spielfreiheit zu achten. Der Motor wird auf einer Art Löffel gelagert. Die Achse wird an 2 Stellen mit kleinen Kugellagern am Heckarm gelagert und ist frei drehbar. Hier ist auf Leichtgängigkeit zu achten. Unterhalb des Motors ist ein Servo montiert. Dieses Servo ist über einen Kugelkopf mit dem Arm verbunden und schwenkt den Arm spielfrei um ca. +- 30 Grad. Im späteren Betrieb wird man sehen dass das Servo sich permanent bewegt und somit dem Gieren des Kopters entgegenwirkt. Die Sensoren werden so präzise und genau sein dass ein senkrechter Start mit Vollgas ohne das leiseste Wegdrehen des Kopters quittiert wird, das geht aber nur wenn alles spielfrei ist. Als Servo habe ich hier ein HS81MG genommen das ich noch hatte. Das Servo wiegt 18g, das von William in seiner Bauanleitung empfohlene 10g weniger und ist zudem deutlich preiswerter. Bei einer der nächsten Bestellungen werde ich mal ein oder zwei Servos mitbestellen und testen. Vielleicht kann ich in dem Zusammenhang auch den Halter noch einmal überarbeiten und leichter ausführen.
Erste Tests
Nachdem Chassis und Elektronik fertig waren wurden noch schnell 3x A123 Zellen unter geschnallt und ein erstes Mal alles in meiner Werkstatt in Betrieb genommen. Natürlich waren einige Feineinstellungen nötig, auch musste ich feststellen das es durchaus Sinn macht die Adressen der Regler so zu verteilen wie es vom William vorgesehen wurde. Es ist vollkommener Blödsinn dem Heckregler die Adresse des rechten Reglers zu zu ordnen, so kann das Teil niemals fliegen...

Wieder was gelernt, es geht doch nichts über das Studium der hervorragenden Dokumentation. RtfM (Read the fine Manual) nennt man so was auf Neudeutsch. Wie bereits erwähnt hatte ich die modifizierten Regler mit einer Schnittstelle ausgestattet sodass hier schnell Abhilfe geschaffen werden konnte. Kleinere Justagen in den Parametern wurden noch schnell durchgeführt und in die CPU überspielt. Geht alles sehr einfach und sehr zuverlässig, ich war wiederum sehr erstaunt das dieses Projekt so stimmig von einem Einzelnen durchgeführt wurde. An dieser Stelle nochmal ein großes Lob und großen Dank an William Thielicke.
Der richtige Erstflug verlief sehr vielversprechend. Noch ein wenig wackelig auf den Beinen konnte ich mich schnell mit den Eigenschaften des Kopters anfreunden. Weitere Justagen an den Einstellungen wurden durchgeführt und verfeinert. Recht zügig konnte ich das Verhalten des Tricopters so einstellen das er in meiner für Flugbetrieb viel zu kleinen Werkstatt stabil und ohne großes Gegensteuern in der Luft stand. Das Flugverhalten im Schwebemodus (dazu später mehr) ist ähnlich gutmütig wie bei einem Koaxheli. Leider konnte ich die kommenden Tage nicht mehr als Flugübungen in der Werkstatt durchführen. Es schneite und war mir viel zu kalt als das ich mich zum testen nach draußen begeben wollte.
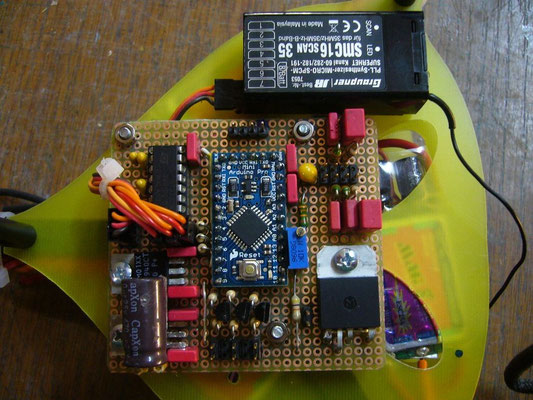
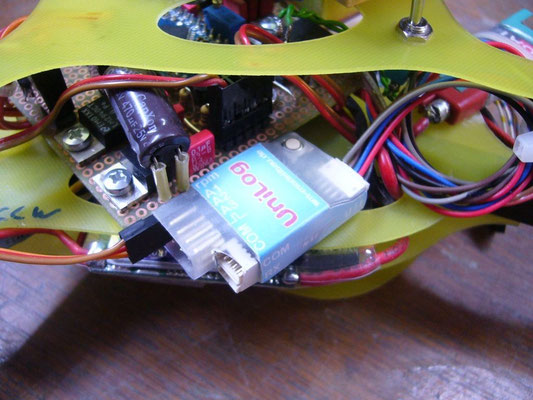
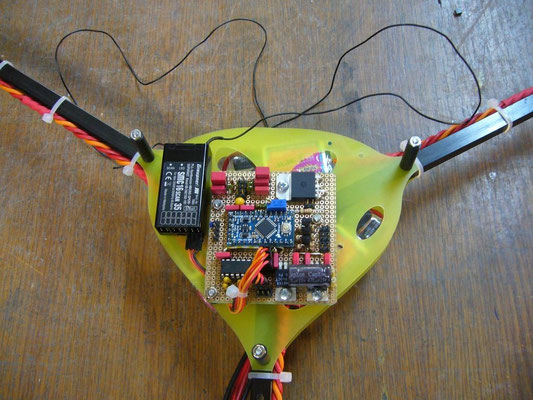
Die Zeit nutzte ich um am Trikopter weiter Verbesserungen und Vereinfachungen vorzunehmen. Ich habe so den Trikopter um einen UNILOG Datenlogger der Firma SM Modellbau erweitert. Mit Hilfe dieses Loggers werden während des Fluges Daten wie Strom, Spannung, Umgebungstemperatur und Drehzahl des Heckmotors aufgezeichnet und später über eine Software in den PC gelesen. Dadurch kann ich zum Beispiel die Spannungslage des Akkus beobachten und dadurch Rückschlüsse auf die Leistungsfähigkeit ziehen. Auf diesem Wege habe ich festgestellt das die entnommene Kapazität (Summe aus Spannung und Strom) bis auf 20mAh identisch ist mit der Kapazität die ich via Hyperion in die A123 Zellen einlade.

Der Spitzenstrom liegt irgendwo bei ca. 20A maximal wenn ich mit Vollgas durchstarte (in der Zwischenzeit ist es wieder etwas wärmer geworden). All diese Daten werden während des Fluges aufgezeichnet und abgespeichert. Die können nach dem Flug ausgelesen und in einem Diagramm ins Verhältnis gesetzt und dargestellt werden. Sehr informativ. Weiters wurden einige Kabel gekürzt und Bauteile wieder entfernt. Ich war in der Zwischenzeit in den Besitz einer USB Schnittstelle für meine Hyperion Ladegeräte gekommen und musste feststellen das ich mit dieser Schnittstelle im Gegensatz zu dem eingangs erwähnten USB/seriell Wandler mit dem Trikopter eine Verbindung aufbauen konnte. Das hieß "Adè" für den MAX232 Schnittstellenwandler. Die Beleuchtung wurde um rote, grüne und weiße ultrahelle Leuchtdioden erweitert um den Betriebszustand besser sichtbar zu machen.
Zwei blaue Leuchtdioden sollten die Elektronik beleuchten und wurden entsprechend platziert. Dies war allerdings eine dumme Idee, bei einem vorsichtigen Nachtflug war ich permanent so geblendet das ich den Flug abbrechen musste weil ich andauernd von mindestens einer Leuchtdiode geblendet wurde.
Verhalten und Eigenarten
Der Trikopter kennt 2 Flugmodi die über einen einfachen Umschalter mit Mittelstellung abgerufen werden können. Um den Trikopter überhaupt zu starten muss sich dieser Schalter in der untersten Position befinden. Wird der Gasstick ebenfalls auf Null gezogen initialisiert der Trikopter und signalisiert das mit einem gleichzeitigen Blinken aller drei Leuchtdioden. Bis dahin haben nur zwei Leuchtdioden geblinkt. Die Mittelstellung nennt sich Kunstflugmodus. In dieser Stellung ist die Flugleistung am ehesten mit der eines "normalen" Hubschraubers zu vergleichen. Er ist nicht selbststabilisierend sondern verharrt im vorgegebenen Winkel. Mit diesem Modus sind zum Beispiel auch Überschläge möglich. Schalterstellung oben wird Schwebemodus genannt. In diesem Modus ist der Trikopter selbststabilisierend, die Horizontale wird in der Parametrierungssoftware voreingestellt. Ich bevorzuge noch diesen Modus da er mir die Sicherheit gibt die ich beim Hubschrauber immer vermisste. Sobald der Schalter in die untere Position gestellt wird und der Gasstick ebenfalls auf Null steht werden augenblicklich die Propeller abgeschaltet. Das Flugverhalten im Schwebemodus ist sehr gutmütig und für den erfahrenen Piloten wahrscheinlich langweilig. Der Kopter kippt im Gegensatz zu einem Hubschrauber nicht so schnell weg, auf einmal ist Nasenschweben einfach kein Thema mehr weil man sich nur noch um die Nickachse kümmern muss. Die Rollachse wird kontrolliert und ausgeglichen. Ich habe in kürzester Zeit wieder den Flug auf mich zu in den Griff bekommen. Die Beschleunigung ist in meiner Konfiguration schon nicht schlecht. Natürlich kann ich keine Werte liefern sondern nur subjektive Eindrücke. Es gibt allerdings noch ein wenig Spielraum in Sachen Gewicht den ich ausschöpfen kann und werde.
Telemetrie
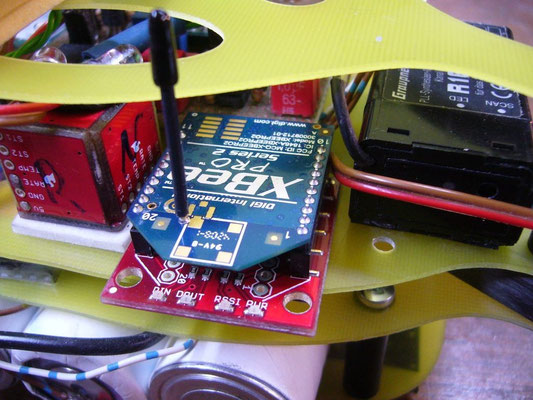
Als weiteres Schmankerl ist noch eine Funkstrecke eingebaut worden über die ich eine Art Telemetrie herstellen kann. Da ich leider (oder eher Gottseidank) keine 2,4GHz Anlage habe muss ich mir auf diese Weise helfen. Für den Job sind Funkmodule mit der Bezeichnung XBee vorgesehen. Die XBees sind beide identisch, nur die Adapterplatine habe ich in zwei Ausführungen geordert. Die eine Variante wird direkt über USB Anschluss mit dem Notebook verbunden. Im Trikopter wird eine UART Variante verbaut sein die direkt an den Datenausgang des UNILOG Moduls oder Trikopter angeschlossen werden kann und somit quasi eine Kabelverbindung zwischen Trikopter und Notebook ersetzt. Ich hatte lange geschwankt zwischen Bluetooth und "normalem" Funk und auch einige Forenbeiträge dazu gelesen. Zum Schluss habe ich mich aber für Funk entschieden weil ich selbst beim sogenannten Pairing zwischen Handy und Notebook teilweise Probleme habe. Diese XBees gibt es in verschiedenen Variationen, auch bei der abgestrahlten Sendeleistung gibt es verschiedene Exemplare. Ins Auge gefasst hatte ich eine 50mW Variante die ich aber gedrosselt habe um nicht in Konflikt mit geltenden Gesetzen zu kommen. Das kann sehr einfach über eine Software erledigt werden. Die ausgesuchte Variante hat zusätzlich eine kleine Stummelantenne, ich habe hier also nichts bauen oder zusätzlich löten müssen.

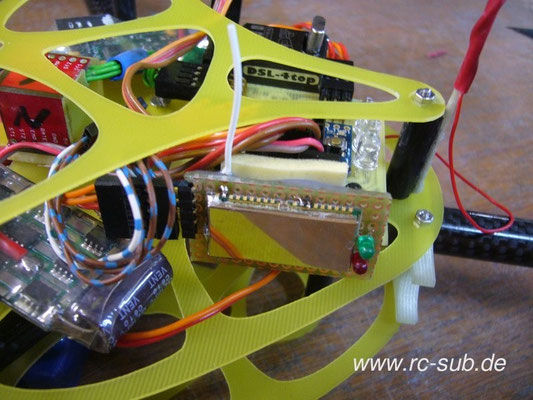
Nach einigem Stöbern im Internet habe ich irgendwann kurz danach auch noch eine gute Bauanleitung für Bluetoothmodule gefunden die konkurrenzlos günstig waren und dabei die Class1 Anforderungen erfüllen. Das reicht für 100m im freien Feld und warscheinlich sehr großzügigen 30m innerhalb Gebäuden. Kurzerhand habe ich mir 4 von den Modulen bestellt die zusammen mit eingem Kleinkram genauso viel kosteten wie eins der XBee Module. Das bauen der Module war dann doch ein wenig kniffliger da die Teile kein normales Rastermass haben. Ich habe das Modul also kurzerhand auf eine Lochrasterplatine geklebt und die benötigten Pins mit sehr feinem Fädeldraht kontaktiert. Da die Module auf 3,3 Volt laufen mussten noch ein kleiner Spannungswandler und ein sogenannter Levelshifter eingebaut werden da die zu kontaktierenden Schnittstellen 5 Volt Pegel haben und somit das Modul zerstört hätten. War aber alles relativ schnell gebaut und funktionierte auf Anhieb. Das finden der richtigen Einstellungen hat allerdings 3x soviel Zeit in Anspruch genommen. Da ich natürlich nichts hatte mit dem ich die Module hätte testen können musste ich viel probieren, aber irgendwann funktionierte es. Ein Modul kostet an reinen Bauteilen knapp 12 Euro, da kann man nicht meckern.
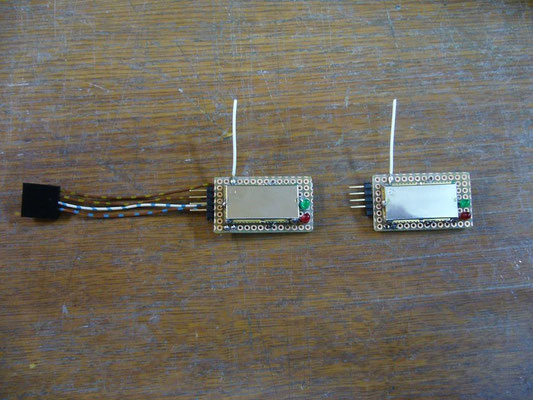
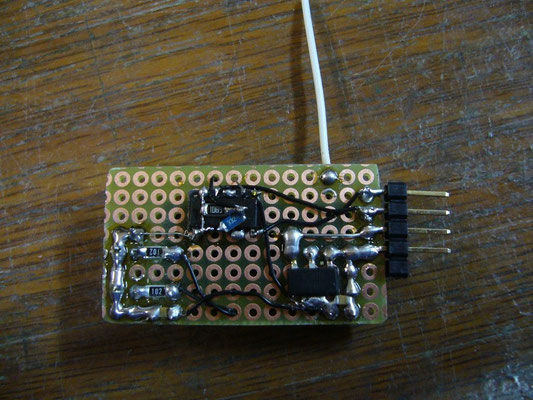
Programmiert werden die Bluetoothmodule über ein beliebiges Terminalprogramm mit einigen wenigen AT Befehlen die sehr gut erklärt sind. Hier kann man zum Beispiel auch auswählen ob es eine PIN geben soll oder ob die Module Kontakt mit jedem Bluetoothmodul in Reichweite aufnehmen sollen. Ich habe letzteres gewählt da diese rückgemeldeten Daten nicht kritisch sind und den Trikopter nicht steuern sondern nur Auskunft über einige Werte sind. Zum Schluß wurden die beiden Bluetothmodule gegen Feuchtigkeit mit wenig Heisskleber vermufft da die Fädeldrähte doch ziemlich filigran sind. Das Trikoptermodul sitzt nun unterhalb des Empfängers und wurde mit doppelseitigem Schaumstoffklebeband an das Chassis geklebt. Ich werde beide Module, XBee und Bluetooth, mal ausgiebig testen.
Verbesserungen
Ich habe noch die dicken Kabel an Motor und Regler gegen dünnere ausgetauscht. Der Gesamtstrom liegt bei 20 Ampere für alle drei Motoren. Grob überschlagen heißt es dass das gut 6,6 Ampere pro Motor sind und somit 2,2 Ampere pro Motorzuleitung. Bei einer Länge von gut 17cm brauche ich da keine 1,5qmm. 0,75qmm sollten auch vollkommen reichen, auf diese Weise liessen sich wieder einige Gramm einsparen die ich an anderer Stelle besser brauchen kann oder eben vom Gesamtgewicht des Trikopters abgezogen werden.
Ein wenig von dem Gewicht habe ich Form einer kleinen Videokamera angelegt. Irgendwann hatte ich mir mal eine Flycam2 gekauft die allerdings nach kurzer Funktion den Geist aufgab. Auf der Suche nach einer Lösung für den Defekt entdeckte ich in einem Forum eine Hinweis auf eine sehr günstige Alternative. Findige Ingenieure im Reich der Mitte hatten eine Kamera von der Größe eines Schlüsselanhängers entwickelt und für ganze 10 Euro inklusive Versand konnte ich meinen Anteil an chinesischer Hochtechnologie haben.

Ich hatte in diesem Zusammenhang auch eine sehr gute Internetseite eines Amerikaners gefunden der sich ausgiebig mit diesen Kameras beschäftigt hatte und nach intensivem Studium wurde die Kamera bestellt. Kurze Zeit später wurde die Kamera in einem schmucklosen Luftpolsterbeutel angeliefert. Sie wurde kurzerhand mit einer 2GB MicroSD Karte bestückt. Grob gesagt kann man pro Minute Video mit ca. 100MB Dateigröße rechnen, das reicht also für gut 20 Minuten Flug. Nach wenigen Testvideos konnte ich feststellen das die Videoqualität recht gut ist. Natürlich ist sie nicht zu vergleichen mit einer Hochleistungskamera, aber das war auch nicht der Anspruch. Bei der Montage muss man wohl Wert auf eine schwingungsfreie Lagerung der Kamera achten. Ich habe sie auf 2 Lagen Scotch Schaumstoffklebeband geklebt, das hat schon sehr geholfen.
Die Videos kann ich nun mit einem USB Kabel runterladen wobei das Interface recht zügig ist, ich bin sehr zufrieden.
Was noch kommt
Die A123 Zellen sind pro W/h deutlich schwerer als Lipos und haben auch weniger Spannung. Man kann auf dem Logger Diagrammen deutlich sehen das die Spannung sehr schnell auf knapp über 9V zusammenbricht. Ich habe mir ein paar Lipozellen bestellt und bin schon gespannt auf das Ergebnis im Vergleich. Die Ladezeit bei den A123 Zellen ist mit maximal 15 Minuten zwar recht kurz, aber die höhere Spannung und das niedrigere Gewicht spielen hier schon ein grosse Rolle. Die Ausleger werden wie bereits erwähnt noch gegen Heckrohr aus CFK getauscht. Dazu werden noch einige Umbaumaßnahmen nötig sein, aber ich denke dass das Ergebnis für sich sprechen wird. Vielleicht fräse ich mir in dem Zusammenhang das Chassis neu aus CFK, ich habe da eine recht günstige Quelle für Plattenmaterial aufgetan die zudem auch noch sehr schnell liefern kann. Die Hauptplatine ist recht schwer geworden. Dickes Platinenmaterial in Verbindung mit viel zu überdimensionierten Bauteilen und Leiterbahnen aus Lötzinn machen die Platine nicht gerade zum Leichtgewicht. Hier würde ein Platine mit SMD Teilen und 0,5mm Material Abhilfe schaffen. Was ich mir noch wünschen würde wäre ein Luftdrucksensor der der Trikopter in gleichbleibender Höhe hält und ein weiterer Schaltausgang für Lampen o.ä. Leider kann ich nicht programmieren, vielleicht findet sich ja auf diesem Wege jemand der fit in BASCOM ist und Interesse hat so was die Software einzubauen. Alles in allem muss ich sagen das der Trikopter ein beeindruckendes Gefährt ist. Was mich besonders an ihm reizt ist die Tatsache, das ich das ganze Ding selbst zusammengebaut habe. Zwar wurde er von jemand anderem entwickelt und ich habe ihn "nur" nach einer Anleitung gebaut, aber irgendwie ist das was anderes als einen Chinabausatz den man stumpf zusammenbaut und dann fliegt. Eigentlich kann man ihn guten Gewissens nicht empfehlen, das Ding macht süchtig...
Für Interessierte gibt es hier einen Link zu Williams Blog mit allen nötigen Informationen:
http://shrediquette.blogspot.com/
Dort finden sich sehr beeindruckende Videos über die Leistungsfähigkeit des Trikopters.
Kleines Update

Nach langer Abstinenz ist es mal wieder Zeit für ein kleines Update.
Nachdem eine Achse im IMU Würfel der Shrediquette das Zeitliche gesehnet hatte, lag der Trikopter erstmal ein paar Jahre völlig unbeachtet auf dem Regal rum. Zwischendurch hatte ich den Hexakopter bis zu seinem jetzigen Bauzustand gebracht, aber auch hier irgendwann mal das Interesse verloren.
Der Trikopter war mir von allen Koptern immer der liebste gewesen. Leicht, agil, ohne Schnickschnack. Auch das ich die Elektronik nach Williams Plan hinbekommen hatte und das Dingen dabei so gut flog, tat sein übriges.
Irgendwann reifte der Plan den Tri wieder in die Luft zu bekommen, und so machte ich mich auf die Suche nach einem geeigneten Controller. Bei Amazon wurde diverse Platinen bestellt, aber die hatten alle irgendwelche Macken. Irgendein Sensor funktionierte nie und so wurden diese Platinen alle verworfen. Ich will nicht ausschliessen, dass diese Platinen allesamt Billigklone der Originale sind und hier minderwertige Bauteile verbaut wurden. Wer billig kauft...

Vor einiger Zeit fand ich in einem Forum dann den Hinweis auf eine Kombination, die Erfolg versprach. Schon im Jahr zuvor hatte ich mir eine neue Funke gekauft, da diese Controllerplatinen alle seriellen Eingang haben und meine alten "normalen" Empfänger damit nicht dienen können. An meiner MC19 hatte ich vor Jahren mal Jeti nachgerüstet, war aber mit der Reichweite überhaupt nicht zufrieden.
Der Hexakopter war damit zuletzt geflogen und bei geschätzten 100m hatte das RSSI Signal schon bedrohlich abgenommen sodass der Warnpiepser anschlug. Lächerlich...
Somit wurde das Experiment Jeti als gescheitert erklärt. Ich habe mich dann mal umgesehen und mich nach einigem Überlegen für eine X9D entschieden. Die hat OpenTX als Betriebssystem und ist erweiterbar. Die Konfigurationsmöglichkeiten sind verglichen mit der MC19 geradezu gigantisch, nicht zu vergessen die Telemetrie. Also wurde die Funke gekauft, eine solide Basis für weitere Spielereien.
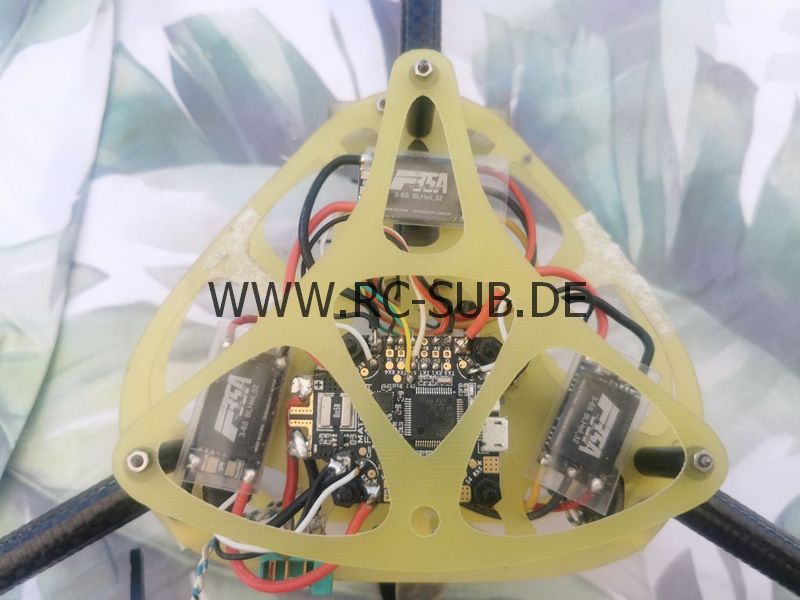
Nun fehlte nur noch der Controller. Eins meiner Probleme war, dass ich niemanden hatte, den ich bezüglich der "richtigen" Komponenten fragen konnte. In besagtem Forum, und nach weiterer Recherche, wurde ziemlich oft die Firma Matek genannt. Die schienen recht gute Controller zu bauen, als versuchte ich bei den einschlägigen Versandhäusern Informationen über den für mich passenden Controller zu bekommen, aber ich konnte tagelang nicht einen einzigen Händler ans Telefon bekommen. Schöne, neue Internetwelt... Also habe ich auf gut Glück einen Matek F405 CTR bestellt, der ist direkt mit Sensoren für Telemetrie ausgerüstet sodass eine weitere Platine entfällt. Zusätzlich habe ich noch 3 BL-Heli32 Regler mitbestellt, wenn schon denn schon.

Was mir bei der alten Shrediquette immer gefallen hatte war die Möglichkeit, das Ding drahtlos zu parametrieren. Zu dem Zweck hatte ich zuerst Bluetooth und später 433Mhz Module angebaut die mit einem passenden Gegenstück via Laptop kommunizierten. Nun gab es ein Platinchen namens SpeedyBee, das anstatt des USB Kabels an den Controller eingestöpselt wurde und für eine drahtlose Kommunikation sorgt. Zack, bestellt.
In dem Thread
https://fpv-community.de/threads/tricopter-mit-betaflight-4-0-und-matek-f405-ctr.85022/
wird beschrieben, wie der Matek Controller zusätzlich zu den ohnehin notwendigen Einstellungen mit ein paar "Zaubersprüchen" auf Trikopter umkonfiguriert werden muss. Dies ist u.A. nötig, um das Servo statt 4. Motor korrekt anzusprechen.
Hier das Zitat aus dem Thread, für den Fall, dass der irgendwann nicht mehr erreichbar ist. Geistiger Eigentümer ist der User Kessl, nicht ich:
1. Servo und Motoren dürfen nicht mit dem selben Timing laufen, außer sie laufen alle auf "normalem" 50 Hz Servo-Signal. Daher: Motor 1 an S1, Motor 2 an S2 und Motor 3 an S3 löten. Der Servo kommt auf S5, da S4 das selbe Timing hat wie S2 und S3. Theoretisch müsste es möglich sein Servo an S1 und die Motoren an S2 S3 S4 zu löten, ich habe es nie getestet.
2. Controller auf Tricopter stellen und in die Kommandozeile (CLI) gehen.
3. 'resource' zeigt die vergebenen Resourcen an. Alle Motoren außer 1-3 jetzt mit 'resource motor X none' (X=4,5,6,7) rausschmeißen.
4. Den Servo an S5 (bei diesem Board A15) binden mit 'resource servo 1 a15'.
5. Die Frequenz des pwm für den Servo bekommt man mit 'get servo_pwm_rate', mit 'set servo_pwm_rate = xxx' kann man sie verändern. Die meisten Digitalservos shaffen 100-200 Hz. Regelmäßig testen ob der Servo heiß wird.
6. Die Wirkrichtung änder man am einfachsten indem man in der Gui den Expertenmodus einschaltet und im Reiter Servos die Rate von '+100%' auf '-100%' ändert. Achtung, Servo 1 im CLI muss nicht Servo 1 in der Gui sein, bei mir war es Servo 5.
Soweit die programmierung auf CLI Ebene. Die aktuelle Programmierung meines Trikopters kann auch hier runtergeladen werden.
Nachdem die Hardware in dem Tri eingebaut und gemäss Anschalteplan auf der Matek Seite
http://www.mateksys.com/?portfolio=f405-ctr#tab-id-3
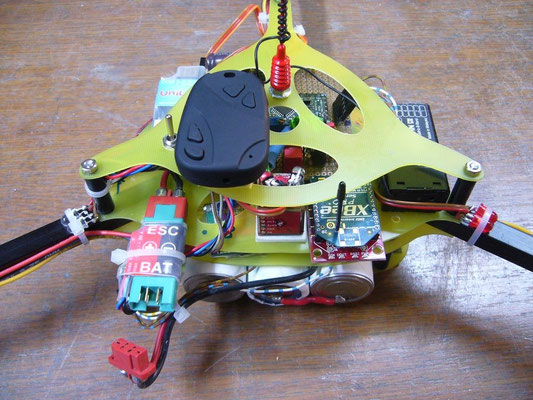
verdrahtet war, musste noch ein Platz für den gigantischen Empfänger Typ R-XSR gefunden werden. Der hängt nun einfach zwischen dem Gebälk, bei geschätzt einem Gramm Gewicht und der Grösse kleiner eines Daumennagels wird das schon passen.

Nachdem der Empfänger mit dem Sender verheiratet war, eine Geschichte für sich, konnte das erste Mal Strom auf den Kopter gegeben werden. Zwischenzeitlich waren auch 3 frische Akkus Marke Turnigy 3s 2200mAh sowie der SpeedyBee Adapter eingetrudelt.
Die ersten Parameter der Grundeinstellung wurden am PC durchgeführt. Das Meiste davon war irgendwie logisch, einiges wurde im Internet nachgelesen und einiges habe in Grundeinstellung gelassen. Die PID Werte zum Beispiel, hier sollte der SpeedyBee Adapter zum Einsatz kommen. Der Adapter benötigt Strom zum Arbeiten, an Werk liegt ein XT Stecker dabei der leide rnicht meinem System entspricht. Ich habe stattdessen einen 4pol Ballancerstecker angelötet und betreibe den Adapter am Ballanceranschluss des Lipos. Die passende App war schnell geladen und nach einigem Hin und Her auch eine Verbindung zwischen Kopter und Handy geschaffen. Klappte nicht immer einwandfrei, mit ein bisschen Fummeln gings aber. Interessant ist hier die Anzeige, warum der Controller blockiert wird und man nicht starten kann. Einer der Gründe ist z.B. das der SpeedyBee Adapter noch dranhängt. Erstmal nervig, aber bei näherer Betrachtung ein Sicherheitsfeature und sinnvoll. Kann man aber auch abschalten wenn das andauernde Verbinden, Adapter suchen, bestätigen, Parameter einstellen und trennen, nervt.

So ausgerüstet gings in den Garten um erste Flugtests durchzuführen. Die wurden aber schnell ad acta gelegt, es regnete mal wieder wie Sau. Irgendwie verlor ich den folgenden Tagen den Focus uns so wurde die Fertigstellung des Projektes auf den Jahresurlaub 2020 verlegt...
... der dann auch irgendwann mal kam.
Was soll ich sagen, mit dem Adapter war das einstellen der Parameter recht schnell gegessen. Auf dem Campingplatz war nicht wirklich viel Platz, aber herumbolzen wollte ich eh nicht. Durch die wissenschaftlich fundierte und in vielen Beispielen als wirkungsvoll belegte "Try and Error" Methode konnte ich den Kopter nach vielleicht ner Stunde ohne Aufschwingen der Motoren in der Luft halten.
Ein paar Dinge fehlen noch, der Kopter braucht dringend wieder Beleuchtung und einen Piepser für leeren Akku (zusätzlich zur Telemetrie). Ausserdem möchte ich wieder einen Leistungstransistor als EIN/AUS Schalter haben. Der wird von 2 in Reihe geschalteten Mikroschaltern an den Klapparmen gesteuert und unterbricht den Stromkreis wenn der Kopter mal abschmieren sollte und dabei einer oder beide Arme einklappen.
Die Betaflight Software bietet in Verbindung mit 2812 RGB LEDs die Möglichkeit, Flugzustände oder einfach nur Bling Bling darzustellen. Ich hatte mir zum Controller direkt eine 6er Platine mit Summer dazubestellt die auch direkt eingebaut wurde. Leider machten die LEDs alles, nur nicht das was sie sollten. Eine Internetrecherche wegen einer anderen Baustelle zeigte, dass der Barometerchip und die LEDs den gleichen Prozessorpin nutzen, so kann das ja nichts geben. Bisschen weiter gesucht fand ich die Lösung, einfach die LEDs auf einen anderen Pin legen und ummappen. Woher soll ich denn wissen, dass das so einfach ist.
Mit den Befehlen:
resource CAMERA_CONTROL 1 NONE
und
resource LED_STRIP 1 A08
save
wurde der LED Streifen auf einen Eingang umgemappt, der bisher für die Kamerasteuerung reserviert war. Da ich keine Kamera nutze klappte das sofort, und nach einem Neustart konnte ich schon sehen, dass die LEDs so leuchteten wie ich das mal eingestellt hatte.
Das mittlerweile arg ramponierte GFK Chassis wird noch gegen eine 0.5mm stärkere Variante getauscht, danach ist der Trikopter perfekt
Hier die letzte Ausgabe von diff:
# version
# Betaflight / MATEKF405 (MKF4) 3.5.6 Feb 16 2019 / 13:20:25 (c28ca22f9) MSP API: 1.40board_name MATEKF405
manufacturer_id# name
name Tricopter# resources
resource MOTOR 4 NONE
resource MOTOR 5 NONE
resource MOTOR 6 NONE
resource MOTOR 7 NONE
resource SERVO 1 A15
resource LED_STRIP 1 A08
resource SERIAL_TX 2 NONE
resource SERIAL_TX 11 A02# mixer
mixer TRI# servo
servo 5 1000 2000 1500 -100 -1# servo mix
# feature
feature -OSD
feature LED_STRIP# beeper
beeper -GYRO_CALIBRATED
beeper -DISARMING
beeper -ARMING_GPS_FIX
beeper -GPS_STATUS
beeper -RX_SET
beeper -ACC_CALIBRATION
beeper -ACC_CALIBRATION_FAIL
beeper -READY_BEEP
beeper -DISARM_REPEAT
beeper -ARMED
beeper -SYSTEM_INIT
beeper -ON_USB
beeper -BLACKBOX_ERASE
beeper -CAM_CONNECTION_OPEN
beeper -CAM_CONNECTION_CLOSED# beacon
# map
# serial
serial 0 0 19200 57600 0 115200
serial 2 8192 115200 57600 0 115200
serial 4 1024 115200 57600 0 115200
serial 30 32 115200 57600 0 115200# led
led 0 5,5::A:1
led 1 6,5::A:1
led 2 7,5::A:1
led 3 8,5::A:1
led 4 9,5::A:1
led 5 10,5::A:1
led 6 4,10::C:6
led 7 5,10::C:6
led 8 6,10::C:6
led 9 7,10::C:1
led 10 8,10::C:2
led 11 9,10::C:2
led 12 10,10::C:2# color
color 6 92,0,255# mode_color
mode_color 2 5 2
mode_color 6 0 2
mode_color 6 1 6# aux
aux 0 0 1 950 1100 0 0
aux 1 1 0 900 1150 0 0
aux 2 2 0 1300 1700 0 0# adjrange
# rxrange
# vtx
# rxfail
# master
set acc_calibration = -56,90,-195
set mag_hardware = NONE
set baro_hardware = NONE
set max_check = 1950
set motor_pwm_protocol = DSHOT1200
set bat_capacity = 2200
set servo_pwm_rate = 100
set osd_vbat_pos = 2282
set osd_ah_pos = 2126
set osd_current_pos = 2282
set osd_mah_drawn_pos = 2282
set osd_craft_name_pos = 2282
set osd_altitude_pos = 2282
set osd_disarmed_pos = 2282
set osd_esc_tmp_pos = 2282
set osd_esc_rpm_pos = 2282# profile
profile 2set dterm_notch_cutoff = 0
set p_pitch = 70
set i_pitch = 5
set d_pitch = 0
set p_roll = 70
set i_roll = 5
set d_roll = 0
set p_yaw = 70
set i_yaw = 5
set level_limit = 50# rateprofile
rateprofile 0
Zum Schluss noch ein Flugvideo mit dem neuen Controller:
Diverse Bilder und Baustadien


VERKLEINERTE VERSION