Nachdem ich die WA201 nach vielen Jahren wieder in meinen Händen halten konnte, mussten einige Veränderungen und Verbesserungen vorgenommen werden. Aber dazu gibts nen separaten Bericht und soll hier nicht wiederholt werden. Die ersten Fahrten fanden in unserem zugeschissenen Ententeich statt, sehr flaches Wasser und gerade ausreichend zum die Grundfunktionen testen. So richtig schnell fahren ging nicht, also musste eine Probefahrt am Duisburger Innenhafen unternommen werden. Dort zeigte sich schnell, dass sich das Boot bei hoher Fahrt nach durchbrechen der Oberfläche auf die Seite legt und durch die schlanke Form mit dem extrem scharfen Bug quasi wie ein Surfbrett fährt. Dann bleibt nur noch das Boot zu stoppen, warten bis es wieder in die senkrechte Lage geht und schon kann es weiter gehen.
Völlig unzumutbar, ich kann so nicht arbeiten... Eine Querlageregelung musste her!
In der Kramkiste fand ich noch eine einfache Briefmarke von Feldmann die ich irgendwo erbeutet hatte und bisher nicht benutzen konnte. Nun musste noch ein X-Mischer her, aber woher bekommt man den am Wochenende? Ich hatte mir mal Chips von Norbert Brüggen brennen lassen, aber die waren alle bis auf einen verbaut. Nach einsetzen in die Platine funktionierte der Chip nicht. Und nu? Selbermachen, klar.
Um das Rad nicht neu zu erfinden, habe ich zuerst einmal im Internet gesucht und u.a einen Link mit einem Programm gefunden.
Leider funktionierte das Programm nicht. Ich habe aber den Fehler gefunden und das Programm etwas aufgehübscht und übersichtlicher gestaltet.
Die Werte "Mitte", "Minimum" und "Maximum" repräsentieren die maximal zulässigen Werte der Fernbedienung und können angepasst werden. Vor allem der Wert "Mitte" ist interessant.
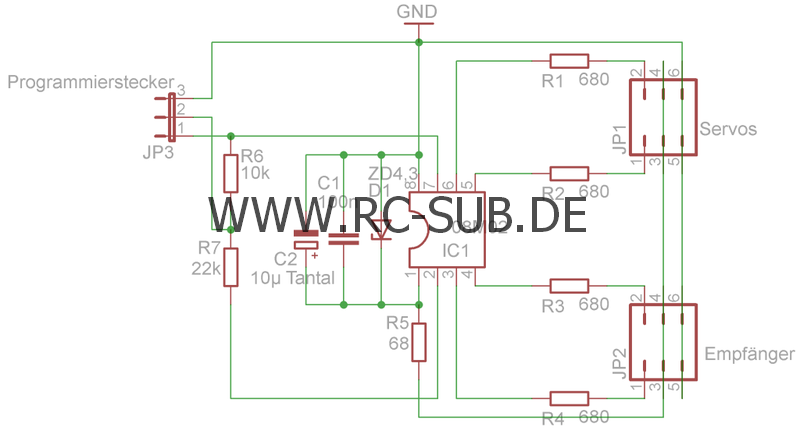
Es muss darauf geachtet werden, wie die Eingänge mit dem Empfänger verbunden werden. Die Reihenfolge muss stimmen. Da der Mischer ohne irgendwelche Umrechnungen arbeitet können theoretisch die Empfängereingänge beliebig belegt werden, tatsächlich muss man aber den Eingang "Tief" mit dem niedrigen Empfängerausgang verbinden da bei gewöhnlichen Empfängern (nicht 2.4 GHz!) die Impulse der Reihe nach ausgegeben werden. Werden die Eingange vertauscht ist es möglich, dass der Mischer sehr langsam arbeitet. In dem Fall müssen die Empfängereingange vertauscht werden sodass die Reihenfolge wieder stimmt.
Der Schaltplan
Das Programm
;xmischer mit picaxe 08m2
#picaxe 08m2
sertxd ("xmischer2 mit 08m2",cr,lf) ;text wird bei einschalten zur identifizierung des chips gesendet
disablebod
symbol quer = c.4 'Eingang Querlage
symbol tief = c.3 'Eingang Tiefenruder
symbol servo2 = c.2 'Ausgang LED
symbol servo1 = c.1
symbol mitte = 150
symbol minimum = 75
symbol maximum = 220
start:
pulsin tief,1,w1
pulsin quer,1,w2
w3=w1 'tiefe speichern
w4=w1 'tiefe speichern
if w2 > mitte then links
if w2 < mitte then rechts
goto ausgabe
links:
w2=w2 - mitte
w3=w3 + w2 max maximum
w4=w4 - w2 min minimum
goto ausgabe
rechts:
w2=mitte - w2
w3=w3 - w2 min minimum
w4=w4 + w2 max maximum
ausgabe:
pulsout servo1,w3
pulsout servo2,w4
goto start