MEIN ERSTES 212 VON 2001
In letzter Zeit sieht man häufiger den neuen Typ 212 der Bundesmarine am See und auf Treffen. So auch im April 2000, als Cord Schröder mit seinem neuen Boot zum ersten Mal in Barsinghausen fuhr. Cord hatte, basierend auf einem 125 mm Abflußrohr, eine handliche Ausführung des Bootes gebaut, welches mich ungemein faszinierte. Vorsichtig nachgefragt, erklärte er sich bereit, mir einen Abzug des Bootes zu verkaufen. Da ich zu der Zeit ein TR1700, basierend auf eben diesem Rohr fuhr, bot es sich an, alle Baufehler an diesem neuen Projekt zu vermeiden. Und tatsächlich ist der innere Aufbau und Anordnung mit allen Komponenten nahezu identisch. Ideal also zum Abkupfern des Innenlebens. Zuerst überlegte ich mir, was am TR1700 schlecht gelöst wurde. Mich hatte immer gestört, dass beim Ablösen des Hecks Servos, Tauchpumpenanschluß, elektrische Verbindungen und der Anschluß für den Drucksensor des Tiefenreglers gelöst werden musste. Dies ist nicht nur äusserst unpraktisch, sondern auch ungeschickt gelöst, da z.B. die Neutralstellung der Servos immer wieder aufs Neue gefunden werden muss. Was war zu tun?
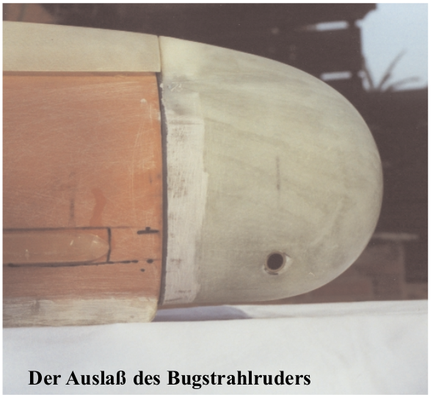
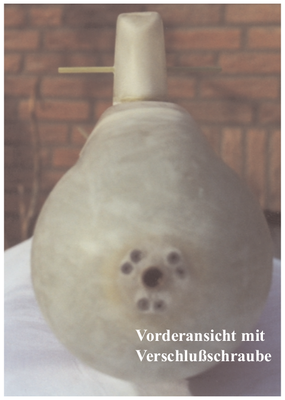
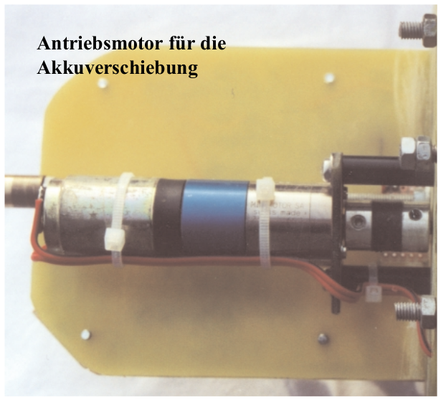
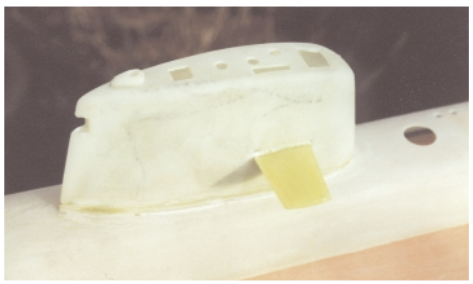
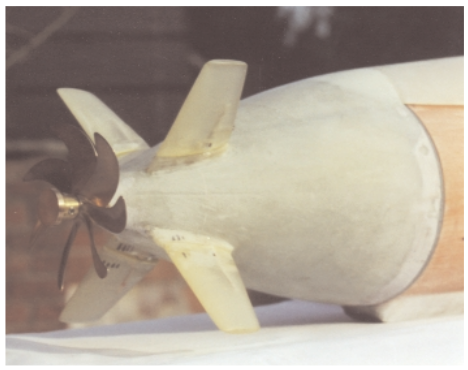
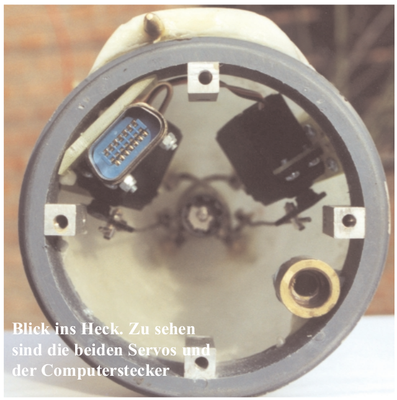
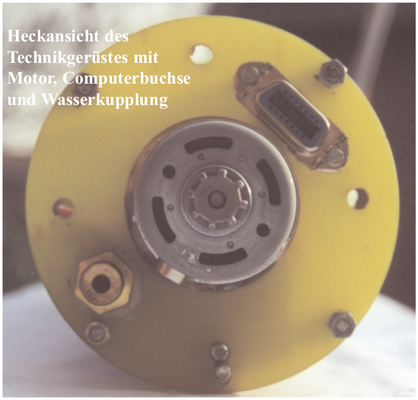
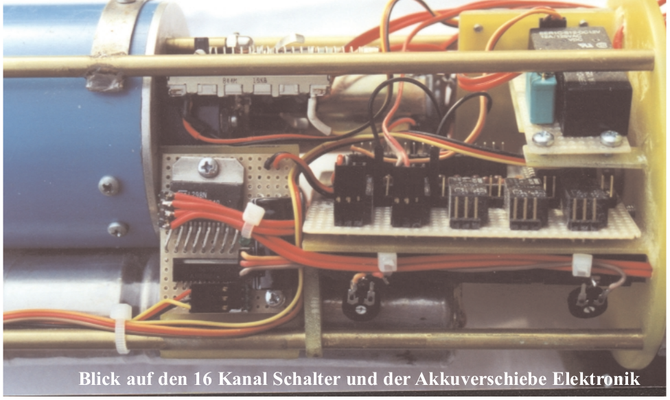
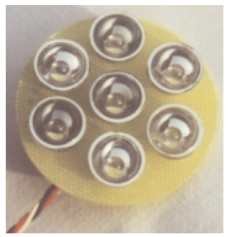
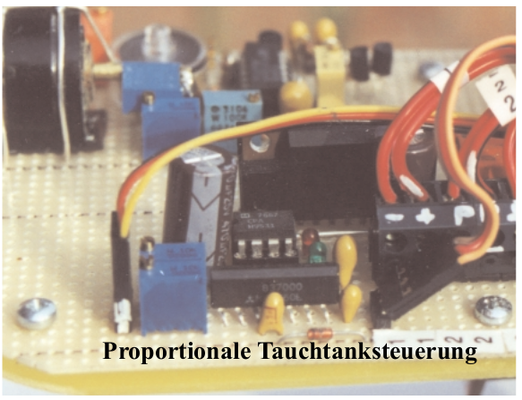
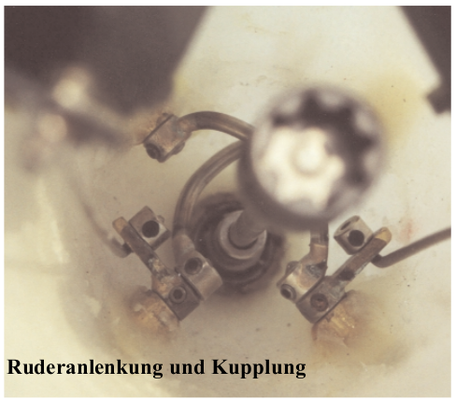
Zuerst wurden die Servos im Heckstück auf Montageplatten befestigt. Einseitig gehalten, braucht hier jeweils nur eine Schraube zum Ausbau des Servos gelöst werden. Beide Servos wurden elektrisch mit einem Computerstecker verbunden. Das Gegenstück ist mit dem eigentlichen Technikgerüst verschraubt. Sobald Technikgerüst und Heckteil miteinander verschraubt werden ist hier der elektrische Kontakt hergestellt. Für Wartungs- und Einstellungsarbeiten gibts ein Verlängerungskabel, damit, wenn das Heck vom Technikgerüst abgeschraubt ist, trotzdem eine Verbindung zu den Servos hergestellt werden kann. Die Schraubenwelle ist im Heck mit zwei Kugellagern gehalten und über Simmerring abgedichtet. Verbunden ist sie mit dem Motor über eine Hochlastkupplung. Der Motor ist mit dem Technikgerüst verschraubt, sodass beim Arbeiten an den Servos nicht der Motor ausgebaut werden muss. Eine Wasserkupplung stellt den Anschluß der Kolbenpumpe zur Aussenwand her. Nun kann ich das Heck vom Technikgerüst lösen ohne irgendwelche störenden Verbindungen zu haben. Der Motor wird über eine Manschette am Technikgerüst gehalten. Funktionstests mit Motor können ohne Heckteil auf dem Tisch durchgeführt werden. Mangelhaft war die recht kurze Fahrzeit beim TR1700. Hier wurde Abhilfe in Form von 7000 mAh Zellen geschaffen. Die 10 Zellen sind unter dem Kolbentank auf einer Stange beweglich gelagert. Zusammen mit einem Linearpoti, Getriebemotor und verstärkter Servoelektronik kann der Akku über einen Verfahrweg von 50 mm verschoben werden. Somit entfällt der Feintrimm des Bootes. Mit einem Drehregler am Sender kann hier die Akkuposition eingestellt werden. Eventuelle Kräfte, die bei einer frontalen Kollision auftreten, werden über die antreibende Gewindestange auf eine Gummikupplung abgegeben und zerstören so den Getriebemotor nicht. Als Kolbentank fand ein 800 ml Tank Verwendung. Dieser Selbstbautank ist mit einem Lineargetriebe von Escap ausgerüstet. Dadurch entfällt die aufwendige Geschichte mit Kugellager, Drehteil, Getriebe etc etc. Der Tank wird auf 2 Arten angesteuert: Zuerst über den bewährten 2 Kanal Schalter aus SONAR Heft 1. Hier wird der Tank im Tip Betrieb gefahren, und ist nur über die beiden Endschalter begrenzt. Natürlich mit Wasserfühler und Senderausfallerkennung. Nach Umlegen eines Schalters am 16 Kanal Schalter wird die Betriebsart von Tip auf Proportional umgeschaltet. Nun fährt der komplett gelenzte Tank bis ca 3 cm vor den Endschalter "geflutet". Hier trifft er auf ein Linearpoti, welches nun die exakte Stellung des Kolbens erfasst und mit dem Sollwert an Sender vergleicht. Der Sollwert kommt vom gleichen Schiebepoti des Senders, welches auch den Tip Betrieb steuert. Somit geht kein Kanal verloren. Die 3 cm Regelweg reichen um das Boot proportional zu steuern. Was interessieren mich die vielen cm von "komplett aufgetaucht" bis zu dem Punkt wo das Boot mit dem Turm unterschneidet? Erst dann fängt doch der Regelbereich einer proportionalen Kolbentanksteuerung an, oder? Sinn der ganzen Aktion ist die spätere Option auf statische Tiefenregelung. Ausserdem ist die ganze Sache so verdrahtet das der Tipbetrieb bei Störungen immer die Oberhand behält. Eine defekte Endstufe der Proportionalreglers führt also nicht zum Verlust des Modells. Die Elektronik zur statischen Tiefenregelung ist schon auf der Platine aufgebaut. Sobald die Saison anfängt werden erste Tests zur Einstellung gestartet. Ich bin überzeugt das es keine leichte Einstellarbeit wird, aber trotzdem zuversichtlich. Basierend ist diese Elektronik auf 2 Schaltungen: Zuerst gibt es da eine Auswerteschaltung von Helmut Huhn für die Conrad "Pump Shoe" Drucksensoren. Diese Sensoren sind in Mini Luftpumpen eingebaut und werden als Restposten für gigantische 3 DM verkauft. Helmut konnte mir anhand seiner Demoschaltung demonstrieren wie bereits das Eintauchen des Druckschlauches in ein Schnapsglas voll Wasser zu einer Reaktion am Kolbentank führte!! Klar, meine Tanks (Stichwort Motor) und meine Elektronik werden weniger sensibel sein, aber ich glaube das es für mich reichen wird. Gimmick an dieser Schaltung ist ein Motorpoti welches dazu benutzt wird die Schaltung im aufgetauchten Zustand auf Null abzugleichen. Ich hingegen benutze dieses Motorpoti dazu die angesteuerte Tiefe zu halten. Dazu wird ein Schalter an meinem Sender umgelegt und das Poti stellt den Sollwert (momentane Tiefe) auf den Istwert (Signal vom Drucksensor) ein. Nun versucht der Kolbentank (hoffentlich) die eingestellte Tiefe zu halten. Um dieses zu realisieren benötige ich den zweiten Teil der Schaltung. Dies ist die proportionale Kolbentank Steuerung aus Norbert Brüggens Buch (2. Auflage!). Die 3 cm Verfahrweg bringen ca 2*50 ml Wasser in Bewegung. Soviel zur Theorie... Wenn die Schaltung funktioniert wird's an dieser Stelle mehr geben. Versprochen! Beim TR1700 hatte ich als Gimmick ein Bugstrahlruder eingebaut. Dieses Bugstrahlruder kam in Form einer Zahnradpumpe von Conrad. Zwar war diese Pumpe nicht besonders kräftig, erfüllte aber ihren Zweck. Störend war nur das laute Laufgeräusch der Zahnräder. Im 212 wollte ich eine andere Lösung ausprobieren. Hier sollte eine Flügelzellenpumpe eingebaut werden. Schnell auf Papier skizziert, wurde Pumpenkörper und Montageplatte für O-Ring und Motor gedreht. Ein tangential eingeklebtes Rohr mit 8 mm Durchmesser leitet den Wasserstrahl. "Zu klein", meinte Christian Hamm, und sollte Recht behalten. Schade nur, dass alles schon sauber eingeklebt und verspachtelt war. Also Augen zu und durch. Am See mussste ich feststellen das diese Pumpe keinen Hering vom Teller zieht. Also musste der Billig Bühler durch einen etwas performanteren Motor ersetzt werden. Lösung nahte in Form eines Maxxon Motors (ein kleiner Schwarzer!), der nun das Boot innerhalb kürzester Zeit auf dem Teller dreht. Klar, ist nicht Scale, aber die Funktion ist sehr zu gebrauchen. Da die X Ruder vor der Schraube sitzen muss das Boot erst mal Fahrt machen damit die Ruder Wirkung zeigen. Mit einem Bugstrahlruder kann man direkt vom Beckenrand ablegen! Als weitere Veränderung zum TR1700 wollte ich die Buglampe neu überarbeiten. Bei der Fahrt in trüben Gewässern ist eine Lampe, welche nach oben strahlt,von Vorteil. Im TR1700 habe ich dazu eine Halogenlampe mit 10 W in die Bugnase eingebaut. Aufwendig war hier die Abdichtung mit Glasscheibe da die normalen Halogenlampen nicht dicht sind. Was mich aber enorm störte war die stete Angst das die Scheibe bricht (Temperaturunterschiede) und der hohe Stromverbrauch der Halogenlampe. Als Alternative wollte ich beim 212 weisse Leuchtdioden ausprobieren. 7 Leuchtdioden auf einem Träger kreisförmig angeordnet brauchen jeweils 30 mA. Zusammen macht das also 210 mA bei einer Helligkeit die mit blossem Auge unerträglich ist. Hier wird auch keine Wärme erzeugt (na ja, streng genommen schon, aber das ist nichts im Vergleich zu einer Halogenlampe!). Nun muss ich auch keine Angst mehr bei Temperaturunterschieden haben wenn das Boot mit erhitzter Scheibe ins Wasser eintaucht. Ausserdem ist die Bauhöhe erfreulich niedrig geworden. Wie beim TR1700 ist auch hier eine Blitzleuchte im Turm integriert. Basis ist die Blitzlichtelektronik von Conrad. Leider ist die im normalen Katalog nicht beschrieben. Man muss hier im Modellbaukatalog suchen. Von einem befreundeten Uhrmacher (Danke, Frank!) hab ich mir eine kleine Glasscheibe für eine Laserpointerelektronik passend zurecht schneiden lassen. Diese hat er auch direkt auf die Linse geklebt. Somit ist der Laserpointer wasserdicht und konnte in den Turm als optisches Gimmick (Stichwort: Morgennebel in Kaiserslautern) eingebaut werden. Im Gegensatz zum TR1700 habe ich beim 212 die Turmruder nicht beweglich ausgeführt. Da beim TR1700 ein Effekt nicht feststellbar war, hab ich beim 212 auf diese Funktion direkt verzichtet.
Das erste Mal
Erste Tests auf der Modellbau Bremen (die Jungfernfahrt) zeigten minimale Lecks, welche schnell behoben wurden. Allerdings fuhr das Boot gnadenlos gutmütig. Auch der relativ kleine Ruderausschlag war ausreichend. Anfangs hatte ich da Bedenken. Aber es reichte um relativ kleine Kreise zu fahren. Die Höchstgeschwindingkeit war allerdings (natürlich) zu gering. Dafür werd ich aber schätzungsweise 2 Stunden am Stück fahren können. Reicht also! Das TR1700 war nach 3/4 Stunden echt leergepumpt. Aber da war auch weniger "Ström" und ein dickerer Motor drin. Leider lässt sich im 212 hier keine elfte Stresszelle einbauen. Vielleicht wär noch ein wenig Platz da, aber ich habe leider zu wenig Auftrieb. Beim TR1700 hatte ich einen Edelstahlkiel unters Boot geklebt. Sinn war der Schutz des doch relativ weichen Rohres gegen Grundberührung und unsanften Absetzten auf diversen Beckenrändern. Natürlich hab ich auch das beim 212 wiederholt. Leider hab ich mich irgendwo verrechnet, das Boot ist ein wenig hecklastig.
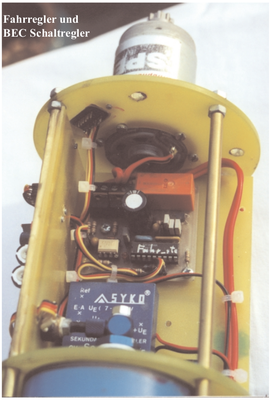
Ich muss also zur groben Kompensation Blei (oder Elektronik) in den vorderen Teil des Bootes einbauen, um sicher zu stellen dass in Mittelstellung des Akkus das Boot relativ waagerecht ist. Da im Bug kein Platz mehr ist, wird es wohl nix mit 11 ter Zelle werden. Ansonsten sind bewährte Komponenten zum Einsatz gekommen. HITEC Servos, Selbstbau Fahrregler (Heft 5 schon komplett gelesen???), BEC System auf Schaltregler Basis, 2 Kanal Schalter aus Heft 1, KD Wolks Ein Ausschalter aus Heft 3, 16 Kanal Schalter für diverse Schaltfunktionen (werde ich wohl irgendwann auch mal bringen), Tiefenregler von Brakmann und Selbstbau Mischer mit PIC von Norbert Brüggen. Probleme bereiteten diverse Störungen während der ersten Probefahrten. Die habe ich aber beseitigen können durch den Einsatz von sog. EKR Elkos. Äusserlich nur wenig höher als normale Elkos haben diese Kondensatoren einen wesentlich geringeren Innenwiderstand. Daher können sie hervorragend zur Störunterdrückung eingesetzt werden. Einfach parallel zum Spannungseingang von Fahrregler, 2 Kanal Schalter etc geschaltet und die Störungen sind so gut wie verschwunden. Aber aufgepasst, es MÜSSEN EKR Typen sein. Was anderes hat NICHT die gleiche Wirkung. Die Elkos bekommt man nicht überall aber bei Norbert Brüggen. Leider ein bisschen teuer aber oft die letzte Rettung. Leider lassen sich Elektromotoren damit NICHT direkt entstören. Falschpolung nehmen die echt übel (vielleicht auch der Fahrregler...).
BILDER
Leider habe ich nur noch Screenshots aus dem damaligen SONAR Beitrag, die originalen (Chemie) Bilder sind im Laufe der Jahre verloren gegangen.