LEISTUNGSMESSUNG VON ELEKTROMOTOREN
Vor einigen Jahren habe ich mich für einige Zeit mit dem Bau von Brushlessmotoren beschäftigt. Damals waren die Motoren noch nicht ganz so vielfältig wie heute, wo man praktisch an jeder Ecke ein Riesensortiment zum schmalen Preis käuflich erwerben kann. Die ersten Motoren hatte ich aus Statorpaketen von alten Bühler Motoren gefertigt. So entstand ein Motor für mein Flugzeug (mit dem man dann auch endlich Loopings fliegen konnte) und mein erstes 17b. Dort sollte er den Ersatz für einen fetten 900 BB Torque samt Getriebe werden.





Irgendwann kam der Wunsch hoch, die tatsächlich abgegebene Leistung der frisch gebauten Motoren zu ermitteln. Zu diesem Zweck habe ich einen Motorprüfstand gebaut. Den initialen Impuls brachte, wie schon so oft, Norbert Brüggen. Er erwähnte etwas von einer Wirbelstrombremse und wie so ein Apparat im Grunde funktioniert und was er können muss.
Salopp gesagt wird ein Motor definiert belastet und dabei die Kraft gemessen mit der er sich wegdrehen will. Dabei werden die zugeführte Leistung, die Drehzahl und die Kraft gemessen und die abgegebene Leistung mit Hilfe einer Formel errechnet. Diese im Verhältnis zur zugeführten Leistung gesetzt ergibt den Wirkungsgrad des Motors.
Ich muss gestehen, nach all den Jahren weiss ich das mit den Formeln nicht mehr, aber den Prüfstand selbst habe ich noch und vielleicht kann jemand da noch Informationen zum Aufbau für sich selber heraus ziehen.
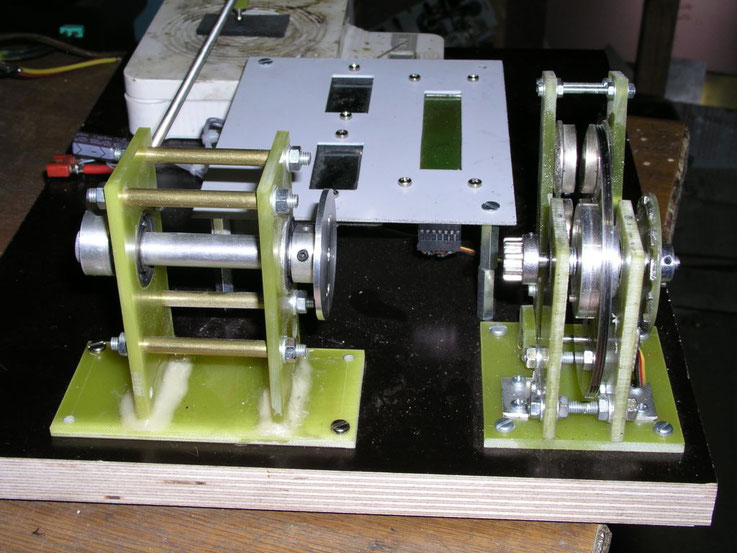
Auf einer Grundfläche aus Multiplex habe ich zwei Halter aufgebaut. Dort sitzen, im ersten Bild links, in der Flucht zwei leichtgängige Kugellager in denen eine Hohlwelle läuft. Frontseitig wird der Delinquent auf die Hohlwelle geschraubt. Die Zuleitungen werden durch die Hohlwelle geführt sodass die später entstehenden Drehmomente nicht durch starre und steife Zuleitungen beeinflusst werden. Die Welle besitzt einen Arm mit definierter Länge und einem Drehteil als Auflagepunkt an seinem Ende. Dieses Drehteil liegt mittig auf einer Digitalwaage auf und ist im Ruhezustand bei nicht drehendem Motor waagerecht. Der Motor ist über eine Hochlastkupplung mit einem paar Aluscheiben verbunden die drehbar gelagert sind. Diese Scheiben stammen aus alten Festplatten, dadurch sind sie sehr präzise gefertigt.
Auf einer, mit einer Kurbel verstellbaren Spindel, wird eine Wippe verstellt, auf welcher 4 Magnete festgeklebt sind. Durch kurbeln werden diese Magnete über die Aluscheiben geführt ohne sie zu berühren. Beginnt nun der Motor sich zu drehen, und werden die Magnete über die Aluplatten gefahren, so werden in den Aluplatten Wirbelströme erzeugt welche die Platten abbremsen und dabei stark erhitzen.
Bei den ersten Versuchen wurden die Klebestellen der Platten zur Welle so heiss dass sie aufgaben und verschraubt werden mussten.



Der auf diese Weise abgebremste Motor dreht sich nun auf der Hohlwelle und stützt sich quasi auf der Waage ab die nun einen Wert anzeigt, der proportional zur Abbremsung ist.
Parallel dazu wird die Drehzahl des Motors gemessen.
Damals hatte ich noch keinen Unitester sodass ich alle Messwerte zufuss aufnehmen musste. Strom und Spannung waren noch einfach über billige Einbaumessgeräte von Conrad zu realisieren. Die Drehzahl war schon anspruchsvoller. Ein digitaler Drehzahlmesser war ziemlich teuer, und so versuchte ich mich mit einem meiner ersten produktiven BASIC Programme. Damals gabs noch keinen PICAXE, sodass ich eine CControl von Conrad benutzt habe. Die war damals ziemlich populär und einfach zu programmieren. Genau das richtige für eine Programmierniete wie mich. Aber ich hab das Programm hinbekommen und das Dingen funktioniert heute noch.
Auf einem rund gedrehten Stück GFK habe ich ein paar Magnete geklebt (und später in Resin gegossen) mit denen ein Hall Sensor betätigt wird. Die Umdrehungen werden somit gezählt und in auf einem 2x16 stelligen LCD Display angezeigt. Nun hat man die Umdrehungen, die Gewichtskraft auf der Waage, Spannung und Strom.
Mit diesen Daten lässt sich der Wirkungsgrad errechnen und die Qualität des Motors bestimmen.

DAS PROGRAMM
Wie bereits erwähnt ist das Programm für eine recht betagte CControl geschrieben. Es ist aber ein ziemlich einfacher BASIC Dialekt der leicht auch auf eine PICAXE umgeschrieben werden kann.
'**************************************
'
' C-Control/BASIC Drehzahlmesser für Brushlessmotoren
'
'
'**************************************
'Benutzt wurde ein 2*16 stelliges Display. Der Freq Eingang
'wird mit einem beliebigen Hallsensor verbunden
'
' --- Definitionen --------------------
define Daten byte ' Pufferbyte
define d word
define rest word
Define zetau byte 'Zehntausender
Define tau byte 'Tausender
Define hund byte 'Hunderter
Define zehn byte 'Zehner
Define eins byte 'Einer
Define LCD Byteport [1] 'port für LCD
define RW Port [10] 'Read/Write
Define ena Port [11] 'Enable von LCD
Define rs Port [9] 'Registerselect LCD
Define befehl byte 'variable lcdbefehl
Define data byte 'variable lcddata
'Umrechnungsfaktor Hallsensoren = 8,571
'anfang
gosub lcdinit
for d = 0 to 7
looktab t1,d,Daten: gosub data:next '_Upm auf Display ausgeben
daten=&hc0:gosub befehl
#anfang
daten =&h02:gosub befehl 'Cursor auf erste Stelle im Display
d = freq2
d = d*5
print d, freq2
'd = d*8 + (d*5)/10 + (d*7)/100 + d/1000 'auskommentieren wenn Hallsensor angeschlossen wird
gosub dezim
daten=(zetau+48):gosub data 'und ausgegeben
daten=(tau+48):gosub data
daten=(hund+48):gosub data
daten=(zehn+48):gosub data
daten=(eins+48):gosub data
goto anfang
'unterprogramme
#lcdinit
RW = 0
daten =&h38:gosub befehl 'initialisierung
daten =&h0c:gosub befehl 'cursor an
daten=1:gosub befehl 'anzeige löschen
return
#befehl
rs =off:lcd=daten:ena =off:pulse ena 'enable lcd
lcd=0 'port zurücksetzen
tog rs
return
#data
rs =on:lcd=daten:ena=off:pulse ena 'enable lcd
lcd=0 'port zurücksetzen
tog rs
return
#dezim
zetau=d/10000:rest=d-10000*zetau 'variable d wird zerpflückt
tau=rest/1000:rest=rest-1000*tau
hund=rest/100:rest=rest-100*hund
zehn=rest/10:rest=rest-10*zehn
eins=rest
return
end
'*************************tabellen********************************
'___Upm
table t1 &ha0 &ha0 &ha0 &ha0 &ha0 &h55 &h70 &h6d :tabend