(FAST EIN) GRIFFON 2000TD
Ein Luftkissenboot wäre mal wieder was...
So fing der ganze Spaß mit dem neusten Projekt an. Irgendwann in den 80ern hatte ich mal ein "Ducks" von Graupner. Damals noch befeuert mit gigantischen 1200mAh Varta Akkus (die guten blauen) und mächtigem RS380 Motor stellte es für mich die Speerspitze des technisch machbaren dar. Naja, ich war halt jung, aber der Samen für ein Luftkissenboot war gelegt. Obwohl das Boot aus ziemlich festem Styropor gefertigt war, konnte es doch so manchen Schlag vertragen und war sehr robust. Keine Ahnung wo es abgeblieben ist, irgendwann hatte ich andere Interessen. Nach vielen Jahren bekam ich noch einmal eins geschenkt, aber auch das war nur kurze Zeit attraktiv und wurde aufs Regal verbannt. Von dort wurde es weiterverliehen oder verschenkt, ist nicht mehr nachzuvollziehen.
Auf der Suche
Dummerweise gibts im Moment nicht allzuviel an Luftkissenbooten zu kaufen, und das was es gibt sagt mir so garnicht zu. Also selber bauen, so schwer kann das ja nicht sein.
Das Internet gibt leider nicht viel zu dem Thema her. Eigentlich nur sehr wenige Seiten, viele Links sind tot oder bringen nicht wirklich weiter. Die mir bekannten Foren spuckten auch nicht soviel aus. [1] ist eigentlich DIE erste Adresse, denn fast alle anderen Seiten beziehen sich auf Mark Porters Seite. Hier habe ich auch ein für mich auf den ersten Blick einfach zu bauendes Boot gefunden, ein Griffon 2000TD. Recht simpler Aufbau und vor allen Dingen eine übersichtlich gestaltete Schürze.
Vorbereitung
Nach Durchsicht der Pläne musste ich aber feststellen, dass das Boot aus 0,8mm Sperrholz gebaut wird. Gefiel mir so garnicht. Zuerst überlegte ich, das Boot aus 1,5mm Platinenmaterial zu bauen. Aber mit Verstrebungen erschien mir das dann vom Gefühl her doch irgendwie zu schwer. Als Ersatz hab ich mir im Baumarkt Selitron ausgesucht. Das Zeugs ist 5mm stark und wird als Trittschalldämmung unter Parket genutzt. Wer sie noch kennt, die alten McDonalds Verpackungen waren aus dem Material. Nachdem ich zuhause die Verpackung aufgemacht hatte musste ich feststellen, dass das auch nicht das Wahre ist. Also nochmal zum Baumarkt und Styrodur Platten gekauft. Diesmal in 20mm und 30mm Stärke, da der Rumpf eine Gesamtdicke von 70mm laut Zeichnung aufwies. Der finale Plan bestand nun aus einer 20mm Platte als Deck, eine 30mm Platte als Zwischenlage und einem 20mm Boden. Eine nicht zu unterschätzende Nebenwirkung von Styrodur ist natürlich auch die Schwimmfähigkeit. Sollte das Boot mal auf Wasser fahren und der Hubmotor aussetzen, so schwimmt das Boot anstatt wie bei Platinenmaterial unter zu gehen oder wie bei Holz eventuell Wasser zu ziehen.
Bau des Rumpfes und der Schürze
Nun wurden die Maße aus dem Plan auf das Styrodur übertragen und die Plattenteile mit einem Cuttermesser ausgeschnitten. Sah nicht wirklich toll aus, alles war irgendwie schief. Die grossen Platten passten nicht auf meine Fräse, also musste ich von Hand schneiden. Versuche mit heissem Draht brachten auch nicht weiter, da man den anhand einer Schablone führen muss wenns was werden soll. Sehr unbefriedigend, und so entschloss ich mich erstmal das Boot unter "Prototyp" oder vornehm "Machbarkeitsstudie" laufen zu lassen. Hört sich besser an als "gewollt und nicht gekonnt"!
Das Schürzenmaterial sollte aus Nylon bestehen, eine schnelle Suche im Internet förderte eine brauchbare Offerte zu einem annehmbaren Preis zutage. Ich habe 2,5qm bestellt, man kann ja nie wissen. Mark Porters Seite lieferte direkt das Schnittmuster für die Schürze, so konnte mit ein wenig Bildbearbeitung und umskalierung der Vorlagen auf das richtige gedruckte Maß nach Erhalt des Stoffes mit der Schürze begonnen werden. Glücklicherweise ist meine Frau in dem Punkt geschickter als ich. Nachdem die Stoffteile ausgeschnitten waren und ich ihr erklärt hatte wie die Teile vernäht werden müssen, konnte ich nach kurzer Zeit die fertig genähte Schürze in Empfang nehmen.
Ging ja einfacher und schneller als gedacht...
In der Zwischenzeit machte ich mich daran den Rumpf herzustellen. Dummerweise gabs die Platten nur mit einer Oberflächentextur. Die soll den Mörtel/Fliesenkleber besser halten als eine glatte Oberfläche. Ist in meinem Anwendungsfall natürlich völlig kontraproduktiv, denn durch die Vertiefungen musste ich zum Verkleben der Platten untereinander Unmengen an Klebstoff verbrauchen. Meine Haushaltstube UHU Por war dann auch schnell dahin. Meine Vorräte an 5min Epoxy waren nahezu unbrauchbar vom rumliegen, ein bisschen ging noch, aber da war noch einiges an Fläche die verklebt werden musste. Ich habe dann Sekundenkleber genommen. Eine ganz dumme Idee wie sich schnell herausstellte. Beim aushärten des Klebers wird er heiss und so schmilzt das Styrodur. Eine hässliche Klebestelle ist das Resultat.
Es musste mehr Kleber her! Interessanterweise ist im Internet eine 570g Dose UHU Por nur wenig teurer als eine 40g Tube... Also schnell ne Dose geordert damit es weiter gehen konnte. Da man aus der Dose schlech dosieren kann habe ich mir Plastikflaschen aus dem Krankenhaus besorgt. Normalerweise ist da Desinfektionsmittel drin, aber leer und ausgewaschen ist das Flaschenmaterial hervorragend geeignet da der Klebstoff nicht daran haftet.
In der 30mm Zwischenlage wurden zusätzliche Luftkanäle eingearbeitet damit mehr Luft vom Hubpropeller in die Schürze gelangen konnte. Auf einer Internetseite hatte ich aufwändige Formeln zur Berechnung von Kissen und Luftmenge und wassweissich gefunden. Alles zu hoch für Vaters Sohn, ich habe die "Versuch macht kluch" Methode angewendet. Für den Hubmotor habe ich einen alten Roxxy Motor genommen den ich noch in der Grabbelkiste hatte. der hatte zwar schon ein vermurkstes Befestigungsgewinde, aber das sollte hier nicht stören. Auf den Motor habe ich einen 8" Slowflyer Propeller montiert der noch aus Quadrokopterzeiten stammte. Ein Streifen 30x2mm Flachalu diente der Befestigung des Motors auf dem Styrodur. Weil man darauf nicht wirklich etwas lösbar befestigen kann habe ich den Streifen mit einer Durchgangsschraube befestigt, die auf der Unterseite eine 30x30mm Aluminiumplatte als Unterlagscheibe hatte. So wurde der Druck beim Anziehen der Schraube gleichmässig aufs Styrodur verteilt. Passt!
Nun konnte die Schürze montiert werden. Zuerst wurde die Schürze einmal provisorisch mit einem Tacker aufs Styrodur geheftet sodass der Hubmotor gestartet werden konnte. Sehr enttäuschend, die Schürze blähte sich kaum auf. Irgendwas stimmte nicht. Natürlich verlor die Schürze Luft an allen Ecken und Enden weil sie halt nur getackert und daher nicht wirklich dicht war, aber so gar kein Druck war dann schon seltsam. Da es eh eine Machbarkeitsstudie war (und ich noch 1,5qm Nylon hatte) beschloss ich, die Schürze mit dem Rumpf zu verkleben. Ich habe die Schürze mit dem UHU Por verklebt und erstmal mit Tackerklammen fixiert solange der Kleber aushärtet.
Beim nächsten Test wurde es nicht besser, immer noch war die Schürze schlaff und auch eine Steigerung von 3 auf 4 Zellen brachte keine Verbesserung ausser mehr Krach. Nach ein bisschen Nachdenken kam dann die Erleuchtung:
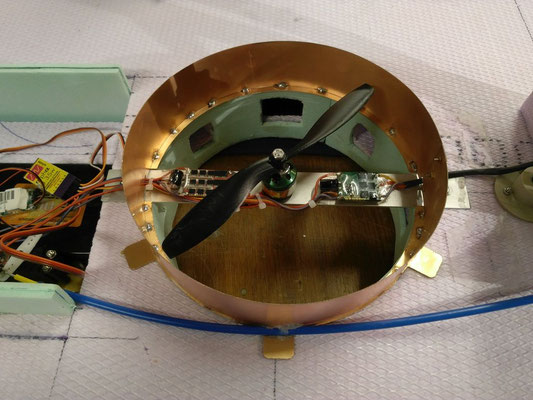
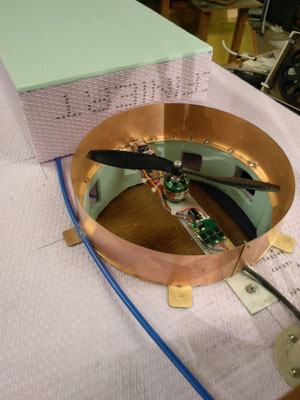
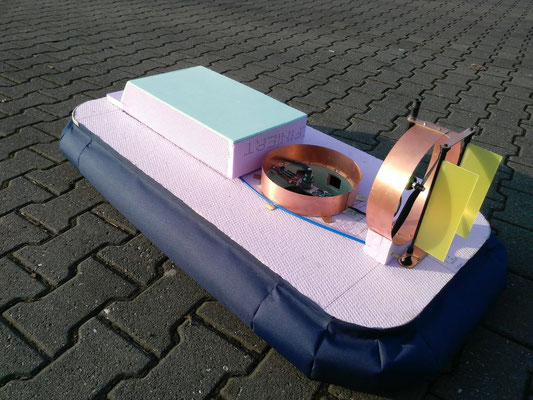
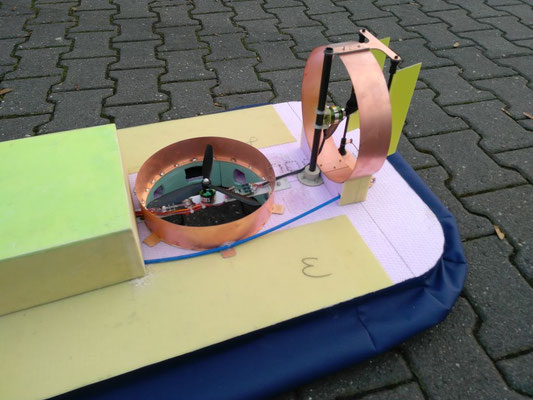
Ich hatte den Propeller aus optischen Gründen IN den Rumpf gesetzt sodass er nicht herausschaute. Dabei waren die Blattspitzen nur wenige Millimeter über den Luftkanälen die die Schürze mit Luft versorgen. Eine deutliche Verbesserung, ja sogar die Lösung des Problems brachte dann die Verlegung des Motors mit Propeller AUS den Rumpf heraus. Das sah zwar bescheiden aus, aber nun reichten 20 Watt um die Schürze prall aufzublasen und den Rumpf zum schweben zu bringen. Schönes Ding!
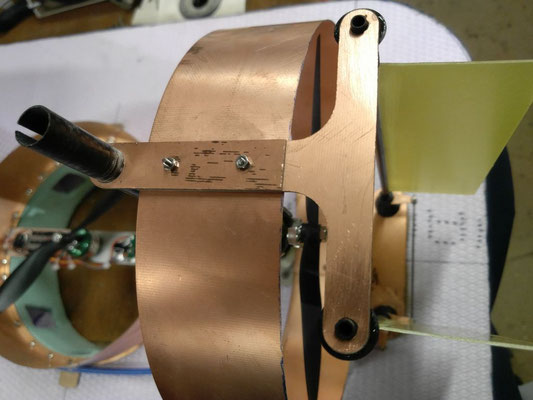
Nun wurde am Schubpropeller gearbeitet. Der Mast an dem der Motor samt Propeller hängt ist ein 12mm Kohlefaser Heckrohr eines Helikopters. Da ich das nicht einfach ins Styrodur stecken kann wurden aus Kunststoff Restmaterial zwei Drehteile hergestellt in denen der Mast steckt. Eins wurde in die Bodenplatte gesteckt, eins wurde auf die Decksplatte gelegt und beide mit durchgehenden Schrauben verbunden. So kann der Mast demontiert werden und hat trotzdem eine stabile Befestigung. Mit der oberen Platte ist er verklebt. Der Motor selbst ist mit Teilen einer Motorhalterung meiner Quadrokopter befestigt. Es ist eine Platte aus GFK mit zugehörigen Schellen. Die wurden zusammengebaut, an der passenden Stelle mit dem Mast verklebt und der Motor draufgeschraubt. Geschützt wird der Prop mit einem Ring aus 0,5mm GFK Plattenmaterial. Ein 70cm langes und 5cm breites Stück GFK wurde mit der Schere auf Maß geschnitten und mit 3 Schrauben zum Ring zusammengeschraubt. Anschließend habe ich aus zwei Platten 2 und 3 cm dickem Styrodur eine passende Halterung geschnitzt in die der Ring eingeklebt wurde. Beides wurde mit reichlich UHU Por auf das Deck geklebt.
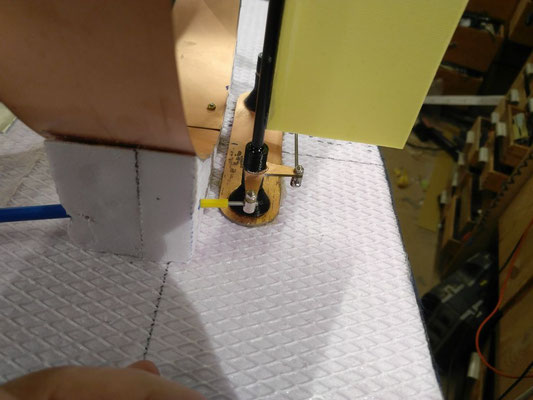
Nun musste noch das Ruder gebaut werden, ein Bauabschnitt mit dem ich mich ziemlich schwer getan habe. Da das Styrodur recht labil ist und der Schubpropeller seinem Namen alle Ehre machte, musste eine recht stabile Lösung gefunden werden bei denen die Ruderlager nicht aus dem Styrodur gerissen werden. Ausserdem brauchte ich noch eine Abstützung für den GFK Ring, da der bei hohen Drehzahlen durch Vibration Kontakt mit dem Propeller hatte. Also wurde eine GFK Konstruktion gezeichnet, die sowohl den Ring mechanisch abfing als auch die Lagerpunkte für die beiden Seitenruder darstellte. Die Ruderwelle ist aus 5mm CFK Rohr auf die 0,8mm dicke Seitenruder mit 170x60mm stumpf aufgeklebt wurden. Die Lagerungen selbst sowie einiger Abstandshalter habe ich schnell gezeichnet und gedruckt, komplettiert wurde das Ganze durch zwei dazu passende Ruderhörner. Leider habe ich mit mit dem Anlenkhebel, welcher vom Servo betätigt wird, ein wenig verzeichnet. Der Anlenkhebel vom Servo kommend steht im rechten Winkel zum Hebel, welcher das zweite Seitenruder ansteuert. Das ist zusammen mit dem Anlenkungsbowdenzug nicht optimal, da dieser nicht senkrecht auf den Hebel trifft sondern etwas seitlich. Einen Winkel von 70° wäre da besser gewesen. Die Fotos erklären das besser als ich es kann. Das dazu gehörige Servo wurde auf einer kleinen GFK Platte montiert die zuerst nur mit UHU Por festgeklebt wurde. Schnell stellte sich aber heraus, dass die Platte sich vom Boden löst und somit wurde eine zweite Platte unterhalb der Bodenplatte montiert und beide GFK Teile mit vier langen Schrauben miteinander verbunden. Nun bewegte sich da nichts mehr.
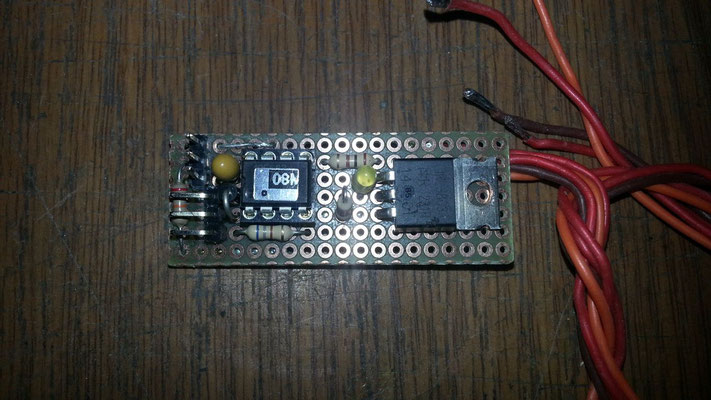
Elektrisches
Die Elektronik ist sehr übersichtlich. Als Drehzahlsteller habe ich für die beiden Roxxys einfache 30A Brushlessregler genommen die aus irgend einer Chinabestellung noch über waren. Ursprünglich sollten die wegen Umpolfähigkeit umprogrammiert werden, aber diese hier stellten sich als ungeeignet heraus, so lagen die jungfräulich rum. Während der Schubpropeller natürlich gesteuert wird ist der Hubpropeller nur über 2 Stufen Kippschalter geregelt, das reicht. Damit man weiss wo vorne ist habe ich eine LED Leiste montiert. Das sind diese Meterstücke die wasserdicht vergossen sind. Üblicherweise kann man den Kleber auf der Rückseite der LEDs vergessen, ich habe den durch sehr gutes Spiegelklebeband ersetzt und schließlich über die gesamte Vorderseite oberhalb der Schürze aufgeklebt. Der Strip zieht bei 15 Volt gut ein Ampere.
Der Empfänger ist ein alter Schulze der noch in der Grabbelkiste lag. Die beiden Regler und zusätzlich ein China BEC habe ich für erste Tests provisorisch auf eine dünne GFK Platte geklebt damit während der ersten Fahrt nichts aneinanderstößt und einen Kurzschluss fabriziert.
3D Modell
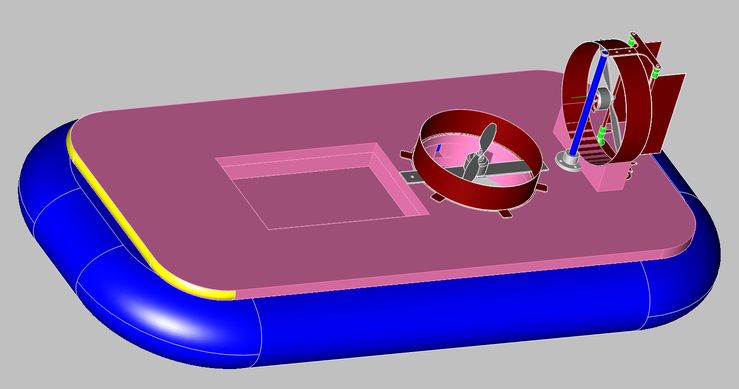
Zum ersten Mal habe ich von einem Modell eine komplette 3D Zeichnung inklusiver aller Komponenten erstellt. Das Modell wurde nicht zuerst gezeichnet und dann anhand der Zeichnung gebaut, sondern die Zeichnung wurde parallel zum Modell erstellt.
Normalerweise stecke ich diese Zeit zu erstellen eines Modells in 3D lieber in den Bau des Modells, aber hier wollte ich es einmal wagen. Wie üblich habe ich mit ViaCAD gearbeitet, ein Programm, dass ich mir vor ein paar Jahren mal zugelegt habe. Das Programm ist für mein Verständnis her sehr einfach zu handhaben. Das habe ich mit anderen Programmen, egal ob Freeware oder Testversion, leider nicht. Dummerweise gibt es immer wieder mal ein paar Mängel die mich furchtbar aufregen, aber ich hab noch keine Alternative gefunden.
Da der Rumpf des Bootes aus einfachen geometrischen Grundkörpern besteht, war eine Zeichnung recht einfach. Die drei Styrodurplatten wurden ausgemessen, gezeichnet und zusammengefügt. Als im Verlauf der zeichnerischen Konstruktion noch das geniale Feature der verschiedenen Layer entdeckt wurde (ich schwöre, das war gestern noch nicht im Programm drin!!!), bekamen alle nun folgenden Komponenten den entsprechenden Layer zugewiesen sodass die bei Bedarf ausgeblendet werden konnten. Wahnsinn, was heute alles möglich ist!
Etwas trickreich war die Konstruktion der Schürze. Ich hatte eine Aussenkontur der Schürze (quasi im aufgeblasenen Zustand) entworfen, die nun entlang der Rumpfform extrudiert werden musste. Bei den geraden Abschnitten an Bug, Seiten und Heck war das kein Problem, aber die vier Rundungen wollten partout nicht extrudiert werden und das verflixte Programm brach jedes Mal mit einer Fehlermeldung von einem nicht zu erstellenden Radius ab. Nachdem ich einen halben Abend damit verbracht hatte alle Möglichkeiten auszuprobieren, erkannte ich den Fehler und konnte die Schürze endlich erzeugen. Sie so oft saß der Fehler ca. 50 cm vom Bildschirm entfernt.
Die erste Testfahrt
An einem Sonntag war es dann soweit. Die Nachtschicht bis 04.30 hatte zur Fertigstellung der zur ersten Probefahrt noch fehlenden Ruderanlage geführt sodass nur noch letzte Handgriffe gemacht werden mussten.
Nachdem alles verkabelt war konnte das erste Mal das Gesamtkunstwerk unter Strom gesetzt werden. Im Sender habe ich ein neues Modell angelegt und die Zuordnungen zu den Empfängerausgängen gemacht sodass die Servowege angepasst werden konnten. Beide Regler sind reine Vorwärtsregler, daher musste beim Gaskanal etwas getrickst werden da ich Mittelstellung bevorzuge.
Endlich waren alle Einstellungen getätigt. Petrus hatte es die ganzen Tage regnen lassen, heute hatte er ein Einsehen, dass es Wichtigeres gibt. Das Modell wurde zur ersten Testfahrt auf den Hof getragen und langsam die Motoren hochgefahren. Der Hof ist gepflastert udn teilweise mit Asphalt bedeckt, sollte also ausreichen.
Waren für das Schweben des Modells beim ersten Test noch wenig Leistung erforderlich, so musste ich nun den Regler voll aufdrehen. Das zusätzliche Gewicht aller zusätzlichen Komponenten die nach dem ersten Test dazukamen schien wohl doch nicht so unerheblich zu sein. Aber es schwebte. Nun konnte ich etwas Gas geben und das Boot fuhr zum ersten Mal zügig, aber nicht zu schnell. Das man diese Boote eh nur sehr schlecht steuern kann ist das ok, ansonsten hätte ich es auch gerne etwas schneller gehabt. Das man frühzeitig gegensteuern muss kannte ich noch von meinem "Ducks" aus den 80ern. Präzises fahren ist was anderes, aber das war mir ja vorher klar (auch wenn ich es nicht mehr SO bescheiden in Erinnerung hatte...). Auf jeden Fall stellte sich heraus, dass der Hof zu klein ist und ich dringend einen Rückwärtsgang brauche. Abbremsen durch Drosselung des Hubmotors verbunden mit aufsetzen des Modells erschien mir auf Dauer keine praktikable Lösung.
Zurück in die Werft
Als erstes fiel mir auf, dass der Schieber für den Hubpropeller trotz 100% Einstellung im Menü nicht zu 100% den Regler aufsteuerte. Es wurden nur 69% erreicht, also wurde am Sender der Kanal auf maximal 130% aufgedehnt, nun macht der Schieberegler auch seine 0 - 100%.
Das Gegendrehmoment des Hubmotors ist im schwebenden Zustand nicht zu unterschätzen. Sobald das Boot schwebt beginnt es sich langsam aber stetig um seine eigene Achse zu drehen. Zuerst war mir völlig schleierhaft wie ich das kompensieren sollte. Eine Möglichkeit wäre ein gegenläufiger Antrieb, aber da erschien mir der Aufwand als zu gross. Eine weitere Möglichkeit wären Leitbleche im Tunnel gewesen, aber das wollte ich mir erstmal sparen und stellte es nach hinten.
Als nächste Verbesserung wurden die beiden Fahrregler auf den Ausleger des Hubmotors verlegt. So liegen sie im permanenten Luftstrom und werden gekühlt, ausserdem konnte ich so die Verkabelung etwas optimieren. Wenn das Boot im Wasser fährt ist natürlich ein ausserhalb des schützenden Rumpfes quasi völlig frei liegender Fahrregler suboptimal. Ich habe daher die beiden Regler nach dem verschrumpfen mit Wet Protect eingesprüht. Das ist ein Spray auf Ölbasis welches stark hygrophob ist und somit das Wasser aus dem Regler fern hält wenn man der Werbung glauben darf.
Ohne Aufbau sah das Boot ziemlich nackt aus, also habe ich einen einfachen Aufbau ähnlich dem Griffon Aufbau aus Selitron und Styrodur Platten zusammengeklebt. Im Rumpf wurden zwei senkrechte Selitron Platten ähnlich einem Süllrand eingeklebt. Über die wird der Aufbau geschoben und hält sehr gut durch Klemmung. Im Rumpf wurde der Akku mittels zweier Styrodurklötze fixiert sodass er nicht verrutschen kann.
Leider hatte ich in der Woche nur wenig Zeit und kam spät heim, sodass es für weitere Probefahrten abends schon zu dunkel war. Somit konnte ich die Veränderungen erst wieder am darauffolgenden Samstag testen.
Zuerst einmal fiel auf, dass der durch die falsche Konstruktion des Hebels (siehe oben) etwas geringere Ruderausschlag keine Rolle spielte. Das recht hohe Gegendrehmoment des Hubpropellers unterstützt beim lenken nach backbord. Den Ausschlag nach steuerbord konnte ich noch durch erhöhen des Ruderausschlages am Sender verbessern. Nun ließ sich das Boot auch wesentlich besser steuern. Zwar immer noch gewöhnungsbedürftig weil halt alles schlechter reagiert als bei einem normalen Boot oder Auto, aber man kann sich dran gewöhnen wenn man das driften etwas übt.
Dritte Testfahrt
Jetzt ging es endlich mal raus auf nen Parkplatz. Das Wetter war gut und nicht windig, also optimale Bedingungen für einen weiteren Testlauf mit viiiel Platz.
Das Boot wurde in den Kofferaum gelegt (war der schon immer so klein???) und los gings zum Parkplatz einer nahegelegenen Spedition. Keine Anwohner in der Nähe die man mit dem Krach der beiden Props hätte stören können.
Nachdem sich das Boot durch den Hubpropeller angehoben hatte gings langsam vorwärts. Reaktion auf Ruder ok. Bei der ersten Wende passierte es dann aber schon: Das Boot hob vorne mit dem Bug ab und überschlug sich. Ein Zeichen dafür, dass es am Bug eindeutig zu leicht ist. Nachdem es wieder rumgedreht war musste der Mast mit dem Schubmotor etwas korrigiert werden. Nun gings erstmal vorsichtig weiter und die Höchstgeschwindigkeit wurde ausgetestet. Nicht schlecht, aber eine Zahl kann ich beim besten Willen nicht nennen. Bei einer Vorbeifahrt sah ich dann auch ganz kurz, wie sich der Wind unter das Boot legte und es leicht anhob. Wäre der Wind etwas stärker gewesen hätte es sich wied.... und da lag es schon wieder auf dem Rücken... Als erste Maßnahme vor Ort wurde der Akku im Rumpf Richtung Bug geschoben sodass dort etwas mehr Andruck erzeugt wurde. Das verbesserte die Sache schon um einiges.
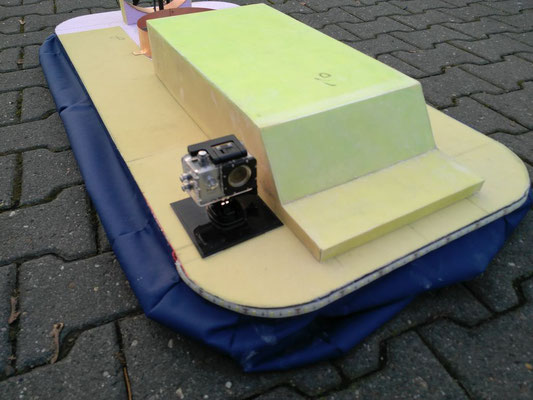
Ein Handyvideo der ersten "grossen" Fahrt konnte ich mangels fehlender dritter Hand leider nicht machen. Aber wozu habe ich denn vor einiger Zeit diese billige GoPro Imitation bei Ebay erstanden?
Zuerst einmal habe ich begonnen, die unansehnliche Styroduroberfläche mit dünnem GFK zu verkleiden.
Dazu hatte ich Sprühkleber bestellt. Dieser wurde auf 0,3mm dicke GFK Platten aufgesprüht, nachdem diese zuvor auf Maß geschnitten wurden. Die Schnitte konnten einfach mit der Schere geschnitten werden.
Beim Aufbau habe ich zuerst noch den Kleber auf das Styrodur aufgesprüht, aber dieses löste sich trotz entgegend lautender Angaben auf der Spraydose an, aber zum Glück nicht auf.
Nun konnte im Bugbereich eine Montageplatte für die China GoPro aufgeklebt werden sodass der nächsten Probefahrt am Samstag nichts im Weg stand.
Das erste Fahrvideo:
Bald gehts hier weiter...
Links:
[1] http://www.model-hovercraft.com/
[2] http://www.schiffsmodelle-wittenberg.de/Hovercraft.html
[3] http://www.aeroglisseur.com/Plans_e.htm
[4] http://www.hovercrafting.de/index.html
[5] http://www.rc-hovercraft.com/
http://www.pellengahr.de/LKF/Lkf.htm
http://www.johp.de/hover.htm